“摄影机跟踪器”工具通过设置 3ds Max 中摄影机运动的动画来同步背景,以便与用于拍摄影片的真实摄影机的运动相匹配。
-
 “实用程序”面板 > “实用程序”卷展栏 > “更多”按钮 > “实用程序”对话框 > “摄影机跟踪器”
“实用程序”面板 > “实用程序”卷展栏 > “更多”按钮 > “实用程序”对话框 > “摄影机跟踪器”
过程
要产生一个摄影机匹配移动,请执行以下操作:
- 打开 3ds Max 中的工作场景。
此场景应用具有一个“自由”的摄影机来匹配移动,它作为跟踪器不产生匹配移动。场景应该具有一个位于 3D 空间中的“点”集或“CamPoint”辅助对象,来与跟踪特征点相对应。可选择在匹配摄影机视口中安装作为基于贴图背景图像的环境影片。如果使用匹配移动或检查匹配准确性来渲染组合时,这是必要的。它不会自动在视口中显示出背景图像。使用“视图”
 “背景图像”来选择背景影片并在视口中显示出来。
“背景图像”来选择背景影片并在视口中显示出来。 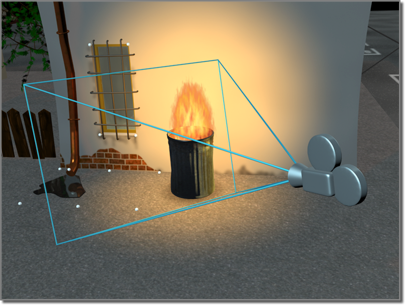
真实世界中的摄影机拍摄一幅场景(白点是跟踪点)。
- 在“摄影机跟踪器工具”中打开影片文件,并为场景中的每一个跟踪特征点创建一个特征点跟踪 gizmo 集合。

这生成被跟踪的电影胶片,它将用作背景。
- 调整每一个 gizmo 的“特征点选择”框和“运动搜索”框的位置,这使它们位于特征点中间,并使运动搜索边界框足够大,可以容纳要跟踪帧的最大“帧到帧”特征点移动范围。
- 将每一跟踪器与相应的场景点对象关联起来。
相关联的场景点对象基于现实世界的维度在 3D 空间中设置。
- (可选)如果要匹配的任意帧都在视图外,请使用“影片 Stepper”卷展栏来给每一跟踪器设置起始帧。这在跟踪器在场景中可见时指定帧范围,它将作为匹配过程被跟踪。视图穿过特征点域时,任何时候都只有一些特征点(至少六个)可见的情况下,这种机制允许匹配电影。
- (可选)在特征点突然发生运动或形状改变或明显受影响的帧上为每一跟踪器手动设置关键帧,这让计算机来实现跟踪很困难。如果需要,可以在跟踪指示跟踪错误在何处发生后做这项工作。
- 使用“批量跟踪”卷展栏执行特征点跟踪。这通常是一个迭代过程:通过调整起始帧来改正跟踪错误或手动重新摆放 gizmo 和运动搜索边界框在错误帧上的位置。当在某一帧上重新摆放 gizmo 位置后,这就建立了一个新的目标特征点图像,并为将要跟踪的下一个关键帧设置后续的帧。可以使用跟踪器中的错误探测特征点来一步步的寻找可能的跟踪错误。完成后,此过程为每一特征点建立一个 2D 移动位置表。可以用“影片”卷展栏上的“保存”按钮把此表保存到磁盘上。
- 在“匹配移动”卷展栏中选择将要匹配的摄影机,选择想要估算的摄影机参数,设置影片和场景动画帧范围并执行匹配。这会产生所选的摄影机参数的关键帧动画。

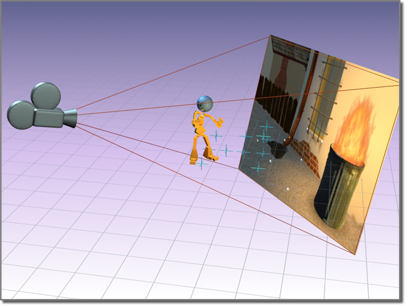
在进行摄影机跟踪后,场景几何体(角色)匹配所拍摄的背景。
- 在这些帧上检查明显的错误匹配和查看跟踪器 gizmo 位置。可以在这些帧上手动调整 gizmo,并使匹配者交互的重新计算摄影机位置。
- (可选)给所选的摄影机参数应用平滑,并为其他重新计算一个补偿匹配。
摄影机跟踪器还能够跟随 2D 平面中跟踪器的移动来生成 3ds Max 几何体跟随或匹配视频的动画。这种类型的动画不需要测量值。使用摄影机跟踪器的“对象旋转”卷展栏来创建这种类型的跟踪。