CATMotion 还集成了 CAT 的重定位系统,与标准 IK 相比具有两个优点:重定位消除了由于 IK 链过度伸长造成的膝关节捕捉问题,并且由于腿推动骨盆上升,角色自动具有了“权重”。
由于重定位可以实现笔直的腿,您可用它来实现使用 IK 难于甚至不可能实现的行走。
在 CATMotion 中,重定位由两个控制器组合控制:KneeAngle 和 LegWeight。
KneeAngle
行走循环可以分为四个膝部角度。在 KneeAngle 控制器中可以对膝部角度进行控制,该控制器位于 CATMotion 编辑器的“腿”下方。
为了便于说明,将四个膝部角度称为抬起、半抬、踩踏和半踩。

1. 半踩
2. 抬起
3. 半抬
4. 踩踏
- 半踩
-
介于踩踏和抬起之间的膝部角度。
- 抬起
-
脚即将离开地面时的膝部角度。
- 半抬
-
步子抬起一半时的膝部角度。
- 踩踏
-
脚放回地面时的膝部角度。
LegWeight
在重定位中使用的另一个重要控制器称为 LegWeight。它位于 CATMotion 编辑器的“腿”下方,与 KneeAngle 在一起。
LegWeight 图形控制脚部平台下拉贴近地面的程度。LegWeight 值为 0 时,增加膝部角度会将脚抬起得更高。LegWeight 值为 1.0 时,增加膝部角度会将骨盆拉低。
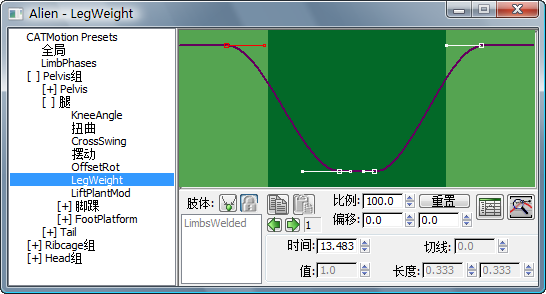
LegWeight 也可看作腿优先级。图形的左侧是抬起优先级,右侧为踩踏优先级。在尝试将膝部推动到躯干上无法达到的角度时,这会非常重要。然后,通过调整腿权重,可以将一条腿设置为该权重,另一条设置为零,从而控制是否会出现此类错误。通常,踩踏腿应获取优先级。
系统中的错误在踝部处同化。如果您注意到踝部倾向于垂直向上或者行为异常,请尝试调整 LegWeight 或 KneeAngle。
通常首先尝试的是减少最大步幅长度,或者增加或减少各个膝部角度。
如果移动看上去有些笨拙,则可能是需要平滑 LegWeight 图形。如果在脚部抬起时踝部太直,则可能是图形上抬起部分的 LegWeight 太长。
跑动和重定位
重定位在行走时非常有用,但并非跑动的理想解决方案。此时,在释放腿部权重和由“飞行”接管之间,基本无法实现有用混合。
目前,建议为跑步和跳跃使用 IK。