每个 CATMotion 控制器的输出是不同因子的组合。例如,“FootPlatform” “抬起”的最终结果是以下内容的组合:最大步数时间、最大步幅长度、路径节点的速度以及分配给脚部平台的所有单个控制器的值。
“抬起”的最终结果是以下内容的组合:最大步数时间、最大步幅长度、路径节点的速度以及分配给脚部平台的所有单个控制器的值。
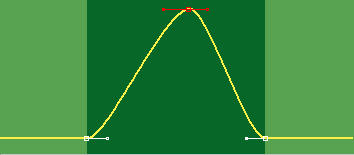
在“FootPlatform”“抬起”面板上看到的曲线,在用于创建该控制器动画的所需结果时非常有用,不过,您还可以在轨迹视图中查看实际结果。
步骤
示例:查看脚部平台的输出曲线:
-
 在视口中选择元素。
在视口中选择元素。 此示例使用脚部平台,但基本过程适用于 CATRig 中的所有元素。
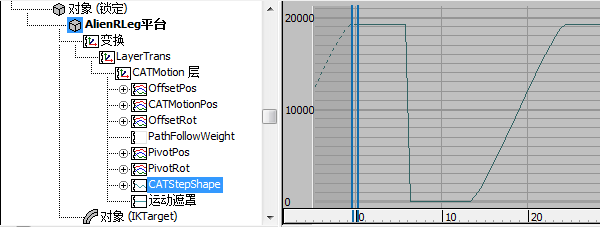
- 在视口中右键单击所选脚部平台,然后选择“曲线编辑器”。
此时曲线编辑器打开,其中显示 CATStepShape 轨迹的曲线。
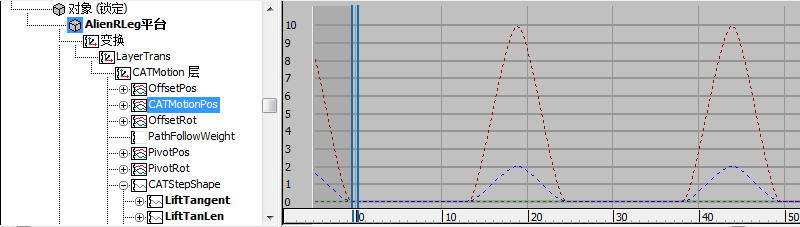
- 单击该 CATMotionPos 轨迹。所选元素的信息保存在此控制器中。
在此处可以查看表示所选 Footplatform 的轨迹的图形,以及与 Footplatform 控制器的 CATMotion 图形的比较(下图)。