测量平面平差的第一步是使用所有测站的近似坐标来计算 C(坐标矩阵)。
下一步,根据计算的观测值(通过坐标矩阵 C 计算得出)和测量的观测值来计算 L 矩阵。以下公式用于确定每个 Li 观测值:
其中:
- Omeas = 测量的观测值
- Ocalc = 计算的观测值
L 矩阵显示为如下形式:
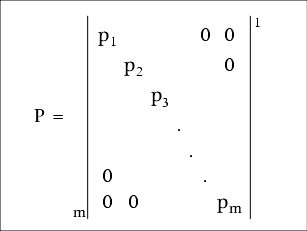
下一步,根据距离和角度的标准偏差来计算对角权值矩阵 P。以下公式用于求解 ![]() (加权距离值)和
(加权距离值)和 ![]() (加权角度值):
(加权角度值):
其中:
![]() 代表长度 ij 的标准偏差
代表长度 ij 的标准偏差
其中:
![]() 代表角度 jik 的标准偏差
代表角度 jik 的标准偏差
最后一步要计算 A 矩阵,该矩阵与通过使用距离观测方程式和角度或方位角/方向角观测方程式确定的每个观测值的坐标更改有关。最初,这些方程式是非线性的,因此使用泰勒级数近似计算可以使其成为线性方程式。