Verwenden Sie die Positionsbeschränkung, damit ein Objekt der Position eines Zielobjekts oder der gewichteten Durchschnittsposition von verschiedenen Objekten folgt.
Die Positionsbeschränkungen richten die Elemente der Roboterkonstruktion aus.
Die Positionsbeschränkung erfordert ein beschränktes Objekt sowie ein oder mehrere Zielobjekte. Sobald das Objekt zugewiesen ist, wird es durch die Position des Zielobjekts beschränkt. Durch Animieren der Position des Zielobjekts wird das beschränkte Objekt dazu gebracht, dieser zu folgen.
Mehrere Ziele und Gewichtung
Ein beschränktes Objekt kann durch zahlreiche Zielobjekte beeinflusst werden. Bei mehreren Zielen verfügt jedes Ziel über einen Gewichtungswert, mit dem sein Einfluss auf das beschränkte Objekt festgelegt wird.
Der Gewichtungswert ist nur sinnvoll (und verfügbar), wenn Sie mehrere Ziele haben. Der Wert 0 bedeutet, dass das Ziel keinen Einfluss hat. Bei einem Wert über 0 hat das Ziel Einfluss auf das beschränkte Objekt. Wie groß dieser Einfluss ist, hängt von den Gewichtungseinstellungen der anderen Ziele ab. Beispielsweise hat ein Ziel mit einer Gewichtung von 80 einen doppelt so großen Einfluss wie ein Ziel mit einer Gewichtung von 40.
Wenn einer Kugel beispielsweise eine Positionsbeschränkung zwischen zwei Zielen zugewiesen wurde und der Gewichtungswert jedes Ziels 100 beträgt, dann behält die Kugel einen gleichmäßigen Abstand zwischen beiden Zielen bei, selbst wenn diese bewegt werden. Lautet der eine Gewichtungswert 0 und der andere 50, dann wird die Kugel nur von dem Ziel mit dem höheren Wert beeinflusst.
Prozeduren
So weisen Sie eine Positionsbeschränkung zu:
-
 Wählen Sie das Objekt aus, dem Sie eine Beschränkung zuweisen möchten.
Wählen Sie das Objekt aus, dem Sie eine Beschränkung zuweisen möchten. - Wählen Sie im Menü Animation
 Beschränkungen Positionsbeschränkung aus.
Beschränkungen Positionsbeschränkung aus. Eine Gummibandlinie erstreckt sich vom beschränkten Objekt bis zum Mauszeiger und gibt an, dass ein Zielobjekt erforderlich ist.
- Auf das Zielobjekt klicken.
So greifen Sie in der Bewegungsgruppe auf die Parameter der Positionsbeschränkung zu:
- Wählen Sie das Objekt mit der Positionsbeschränkung aus.
- Klicken Sie in der
 Bewegungsgruppe Rollout PRS-Parameter auf die Schaltfläche Position.
Bewegungsgruppe Rollout PRS-Parameter auf die Schaltfläche Position. Die Parameter für die Positionsbeschränkung befinden sich im Rollout Positionsbeschränkung.
So bearbeiten Sie Gewichtungswerte:
- Wählen Sie das beschränkte Objekt aus.
- Klicken Sie in der Bewegungsgruppe Rollout PRS-Parameter auf die Schaltfläche Position.
Die Parameter für die Positionsbeschränkung befinden sich im Rollout Positionsbeschränkung.
- Auf ein Ziel in der Liste klicken.
- Verwenden Sie das Zahlenauswahlfeld für die Gewichtung, oder geben Sie einen numerischen Wert ein, um den Gewichtungswert anzupassen.
So animieren Sie Gewichtungswerte:
- Wählen Sie das beschränkte Objekt aus.
- Klicken Sie in der Bewegungsgruppe Rollout PRS-Parameter auf die Schaltfläche Position.
Die Parameter für die Positionsbeschränkung befinden sich im Rollout Positionsbeschränkung.
- Klicken Sie auf ein Ziel in der Liste.
- Aktivieren Sie
 .
. - Verwenden Sie das Zahlenauswahlfeld für die Gewichtung, oder geben Sie einen numerischen Wert ein, um den Gewichtungswert anzupassen.
Beispiel: So weisen Sie zwei Zielen eine Positionsbeschränkung zu und bearbeiten Gewichtungen:
- Erstellen Sie im Ansichtsfenster von oben eine Kugel, einen Quader und einen Zylinder, wobei der Quader zwischen der Kugel und dem Zylinder positioniert wird.
- Wählen Sie den Quader, um diesen auszuwählen, und weisen Sie ihm die Positionsbeschränkung zu. Wählen Sie dann die Kugel als Ziel aus.
- Weisen Sie dem Quader die Positionsbeschränkung erneut zu. Wählen Sie dieses Mal den Zylinder als Ziel aus.
Dem Quader wurde eine Positionsbeschränkung zwischen zwei Zielen zugewiesen.
 Bewegen Sie die Kugel im Ansichtsfenster von oben.
Bewegen Sie die Kugel im Ansichtsfenster von oben. Beim Bewegen der Kugel behält der Quader einen gleichmäßigen Abstand zwischen der Kugel und dem Zylinder bei, da die Gewichtungswerte für beide Ziele gleich sind. Als Vorgabe betragen diese Werte 1,00. Wenn der Kugel ein höherer Gewichtungswert zugewiesen wäre als dem Zylinder, hätte die Kugel einen größeren Einfluss auf den Quader als der Zylinder.
- Wählen Sie zum Bearbeiten der Gewichtungswerte den Quader aus.
- Öffnen Sie die Bewegungsgruppe und dann das Rollout "Positionsbeschränkung".
- Klicken Sie in der Zielliste auf den Namen des Zylinders.
- Ändern Sie mithilfe des Zahlenauswahlfelds für die Gewichtung den Wert von 50 in 20.
Beim Verringern des Werts bewegt der Quader sich in Richtung Kugel.
- Im Ansichtsfenster Oben. Wählen Sie den Zylinder aus, und verschieben Sie ihn.
- Wählen Sie im Ansichtsfenster von oben die Kugel aus, und verschieben Sie sie.
Die Kugel hat mehr Einfluss auf die Bewegungen des Quaders als der Zylinder.
Benutzeroberfläche
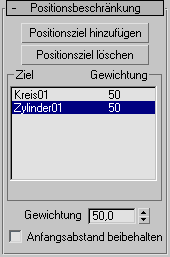
Nachdem Sie eine Positionsbeschränkung zugewiesen haben, können Sie über das Rollout "Positionsbeschränkung" in der Bewegungsgruppe auf ihre Eigenschaften zugreifen. In diesem Rollout können Sie Ziele hinzufügen oder löschen, Gewichtungen zuweisen und Gewichtungswerte für jedes Ziel animieren.
- Positionsziel hinzufügen
- Fügt ein neues Zielobjekt hinzu, das die Position des beschränkten Objekts beeinflusst.
- Positionsziel löschen
- Entfernt die markierten Ziele. Sobald ein Ziel entfernt wurde, hat es keinen Einfluss mehr auf das beschränkte Objekt.
- [Zielliste]
- Zeigt die Ziele und ihre Gewichtung.
- Gewicht
- Weist einen Gewichtungswert für das ausgewählte Ziel zu und animiert ihn.
- Anfangsabstand beibehalten
- Mit dieser Option kann der ursprüngliche Abstand zwischen dem beschränkten Objekt und dem Zielobjekt beibehalten werden. So wird ein Objektfang des beschränkten Objekts am Drehpunkt des Zielobjekts verhindert. Vorgabe = Deaktiviert.