In diesem Bereich der Registerkarte 4-Achsen oder 5-Achsen können Sie festlegen, wie FeatureCAM automatisch die Werkzeugachse einschwenkt, um Kollisionen zwischen dem Schaft und Halter der Werkzeug-Baugruppe und dem Modell zu vermeiden.
Kein Einschwenken - Dies ist die Standardeinstellung und bedeutet, dass Halter und Schaft sind nicht kollisionsgeprüft.
Neigungswinkel - wenn eine Kollision erkannt wird, bewegt sich die Werkzeugachse von der eigentlichen Achse in die Richtung des Neigungswinkels, bis die Kollision vermieden werden kann.
Voreilwinkel - wenn eine Kollision erkannt wird, bewegt sich die Werkzeugachse von der eigentlichen Achse in die Richtung des Voreilwinkels, bis die Kollision vermieden werden kann.
Führungswinkel vor Neigungswinkel – Wenn eine Kollision erkannt wird, bewegt sich die Werkzeugachse von der eigentlichen Achse in die Richtung des Führungswinkels, bis die Kollision vermieden werden kann. Wenn die Kollision nicht durch Drehen des Werkzeugs in Richtung des Führungswinkels verhindert werden kann, dreht sich das Werkzeug in Richtung des Neigungswinkels, bis die Kollision verhindert wurde.
Neigungswinkel vor Voreilwinkel - Wenn eine Kollision erkannt wird, bewegt sich die Werkzeugachse von der eigentlichen Achse in die Richtung des Neigungswinkels, bis die Kollision vermieden werden kann. Wenn die Kollision nicht durch Drehen des Werkzeugs in Richtung des Neigungswinkels verhindert werden kann, dreht sich das Werkzeug in Richtung des Führungswinkels, bis die Kollision verhindert wurde.
Bis Punkt – Wenn eine Kollision erkannt wird, wird das Werkzeug an der Spitze ausgerichtet, die in Richtung des angegebenen Punkts zeigt, und bildet eine Zu Punkt Werkzeugachse, bis die Kollision verhindert wurde.
Von Punkt – Wenn eine Kollision erkannt wird, wird das Werkzeug an der Spitze ausgerichtet, die in entgegengesetzter Richtung des angegebenen Punkts zeigt, und bildet eine Zu Punkt Werkzeugachse, bis die Kollision verhindert wurde.
Zur Flächennormalen hin - wenn eine Kollision erkannt wird, bewegt sich die Werkzeugachse von der eigentlichen Achse in die Flächennormalen Richtung, bis die Kollision vermieden werden kann.
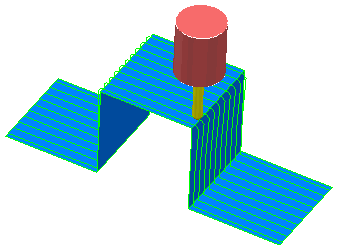
In diesem einfachen Beispiel wird ein X-paralleler Fräsweg über einen Schritt verwendet, was die Auswirkung der Kollisionsvermeidung zeigt. Wenn Sie darüber einen einfachen parallelen Werkzeugweg erstellen, entstehen Kollisionen des Schafts, während er sich nach Oben oder Unten bewegt:

Ein Weg, um dies zu vermeiden ist, die Länge des Werkzeugs zu vergrößern. Ein anderer Weg ist, die Werkzeugwegstrategie zu verändern. Die dritte Art dies zu tun, ist die Kollisionsvermeidung zu verwenden. In diesem Fall ist die Werkzeugachse zunächst Vertikal. Wählen Sie Achse zur Kollisionsvermeidung einschwenken des Voreilwinkel.
Einen neuen parallelen Werkzeugweg erstellen: Sie können jetzt betrachten, dass der Wekzeugweg auf die steilen Bereiche schwenkt, um Kollidieren mit dem Werkzeughalter zu vermeiden.

Jedoch weist der Werkzeugweg weiterhin 3 Achsen auf den flachen Bereichen auf, auf denen der Werkzeughalter nicht kollidiert:
Zusammenfassend versuchen die Werkzeuge die eigentliche Werkzeugachsendefinition für möglichst viele Werkzeugwege zu verwenden. Nur wenn die Definition nicht möglich ist, verändert dies die Werkzeugachse in die bestimmte Richtung aus dem Feld Werkzeugachse einschwenken, bis die Werkzeug-Baugruppe nicht mehr kollidiert.
Führungswinkel vor Neigungswinkel
Das folgende Beispielmodell kann mithilfe der 5-Achsen-Simultanbearbeitung bearbeitet werden:

Bei einer Neigungsachse mit dem Wert Neigungswinkel wird in den Ecken kein Werkzeugweg erstellt  :
:

Bei der Richtung Fixiert und einer Neigungsachse mit dem Wert Aus Profil wird ein unvollständiger Werkzeugweg erstellt.
|
|
|

 - Das zum Generieren des Werkzeugwegs verwendete Profil.
- Das zum Generieren des Werkzeugwegs verwendete Profil.
 - Ein unvollständiger Werkzeugweg.
- Ein unvollständiger Werkzeugweg.
Die einzige Möglichkeit, um dieses Problem zu beheben, wäre, in jeder Tasche ein Profil zu erstellen und für jede dieser Taschen einen separaten Werkzeugweg zu generieren.
Bei einer Neigungsachse mit dem Wert Führungswinkel vor Neigungswinkel wird das benötigte Ergebnis mit einem Werkzeugweg erreicht, sodass die Erstellung zusätzlicher Geometrie nicht notwendig ist.
