|
|
各プーリの場合 |
|
F 2 - F 1 + F p = 0 |
|
|
|
|
|
|
|
|
|
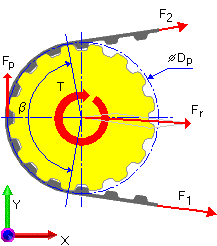
駆動プーリの場合
![]()
|
|
v ≤ v max |
|
|
f b ≤ f max |
![]()
F c = mv 2
F Tmax = k 1 F p + F c
F 1 = F tmax
F 2 = F 1 - F p
個々の被駆動プーリおよびアイドラーの場合
プーリのインデックス i
F Pi = P xi F p
![]()
![]()
![]()
F 1i = F 2i-1
F 2i = F 1i + F p i
ここで
![]() 同期プーリの場合
同期プーリの場合
![]() 平プーリの場合
平プーリの場合
ベルト駆動全体の場合
![]()
必要なベルト取り付け張力は、以下のように駆動プーリでの力から求められます。
![]()
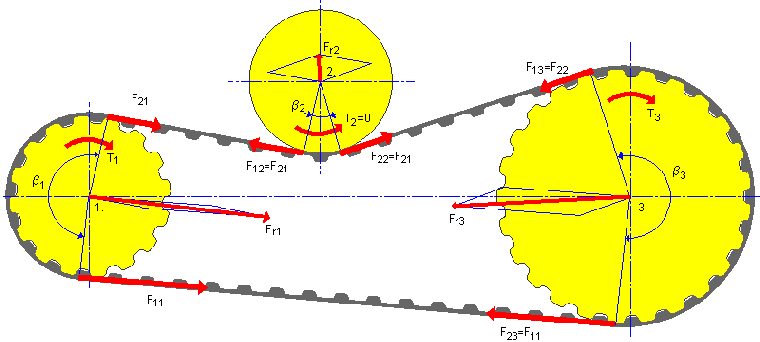
アイドラーでの動力伝達の例
|
駆動プーリ |
フラット アイドラー |
被駆動プーリ |
|
P x1 = 1 |
P x2 = 0 |
P x3 = 1 |
|
|
|
F P3 = P x3 F p |
|
|
|
|
|
|
|
|
|
|
F 12 = F 21 |
|
|
|
F 22 = F 12 + F p2 = F 12 |
|
|
F c = m v 2 |
|
|
|
F Tmax = k 1 F p + F C |
- |
F 13 = F 22 |
|
F 11 = F Tmax |
- |
F 23 = F 13 + F p3 = F 11 |
|
F 21 = F 11 - F p |
- |
|
|
|
- |
- |
使用される変数の意味:
|
F p |
有効張力[N] |
|
F 1 |
指定プーリの入力側のベルト張力[N] |
|
F 2 |
指定プーリの出力側のベルト張力[N] |
|
z |
指定プーリの歯数/ベルトの歯数[-] |
| β |
接触弧/歯の側面傾斜角[度] |
|
P |
伝達する動力[W] |
|
P R |
指定トランスミッション レイアウトのベルト定格動力[W] |
|
c L |
稼働係数[-] |
| β |
接触弧[度] |
|
T |
指定のプーリに作用するトルク[Nm] |
|
n |
指定のプーリの速度[rpm] |
|
D p |
ピッチ プーリの直径[m] |
|
v |
ベルト速度[m/秒] |
|
k |
ベルト駆動内のプーリの数[-] |
|
L |
ベルト ピッチの長さ[m] |
|
P |
伝達する動力[W] |
|
m |
指定した幅での特定ベルト重さ[Kg/m] |
|
k 1 |
ベルト張力係数[-] |
|
F p |
有効張力[N] |
|
F c |
遠心力[N] |
|
F t |
ベルト取り付け張力[N] |
|
P xi |
指定のプーリの動力比[-] |
|
D pi |
ピッチ プーリの直径[m] |
|
i |
指定のプーリの動力比(速度比) [-] |
|
T i |
指定のプーリに作用するトルク[Nm] |
| η |
効率[-] |
|
p b |
円ピッチ[m] |
|
D |
平プーリの呼び径[m] |
|
H |
ベルト高さ[m] |
|
h T |
ベルトの歯高さ[m] |
|
a |
ピッチ線オフセット[m] |