Character Settings 内の Retargeting プロパティ グループで、Actor プロパティはキャラクタの Actor 入力ソースを調整できます。
- Human Limits プロパティの設定
- Motion Reduction プロパティの設定
- Feet Stabilization プロパティの設定
- Damping プロパティの設定
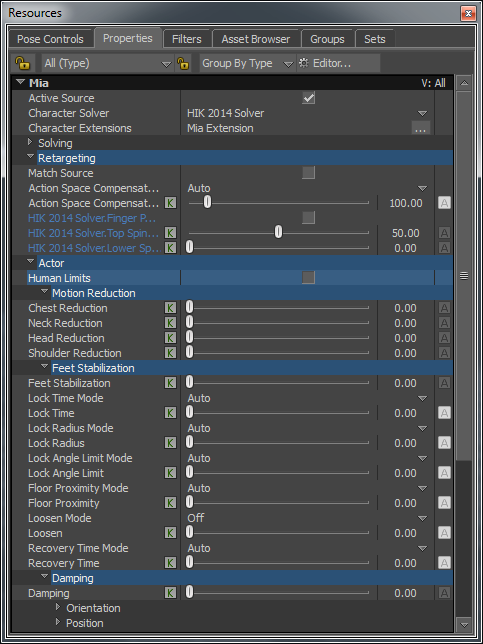
Retargeting Actor タイプのプロパティの設定
Human Limits プロパティの設定
Human Limits プロパティの設定を使用すると、手や足の到達度には影響を与えずに、キャラクタのボディ パーツが不自然に曲がらないようにすることができます。
Human Limits をオンにすると、キャラクタの動きが少し変わるかもしませんが、人体の制限を考慮せずにモデルの動きに正確に合わせることより、合理的な動きを優先します。
Feet Stabilization プロパティの設定
Feet Stabilization プロパティの設定では、モデルの足を安定させることができます。この設定は、データにノイズがあってモデルの足が震える場合などに必要になることがあります。
Feet Stabilization プロパティの設定について、次の表で説明します。
|
Feet Stabilization プロパティの設定 |
説明 |
|---|---|
|
Feet Stabilization |
モデルの足を安定させることができます。 |
|
Lock Time Mode |
Off に設定すると、Lock Time が無効になります。User に設定すると、手動で Lock Time のフレーム数を指定できます。既定では Auto モードが選択され、Lock Time は自動的にフレーム数を計算します。 |
|
Lock Time |
指定したフレーム数の後に足が静止するように設定します。これにより、足は指定した範囲外に動きません(Lock Radius と Lock Angle Limit)。 |
|
Lock Radius Mode |
Off に設定すると、Lock Radius が無効になります。User モードでは、手動で、Lock Radius プロパティを変更できます。既定では Auto モードが選択され、Lock Radius が自動的に計算されます。 |
|
Lock Radius |
半径の許容差を設定した後に足のスタビライズのロックを解除します。 |
|
Lock Angle Limit Mode |
Off に設定すると、Lock Angle Limit が無効になります。User モードを選択すると、手動で角度の許容差を調整できます。Auto モードは既定のオプションで、ユーザに代わって角度の許容差を計算します。 |
|
Lock Angle Limit |
足のスタビライズのロックを解除する前に角度の許容差を設定します。 |
|
Floor Proximity Mode |
Off に設定すると、このモードが無効になります。User モードを選択すると、床へのキャラクタの足のプロキシミティを手動で調整できます。Auto モードは既定のオプションで、ユーザに代わってプロキシミティを計算します。 |
|
Floor Proximity |
床へのキャラクタの足のプロキシミティを調整できます。 |
|
Loosen Mode |
Off に設定すると、Loosen プロパティが無効になります。User モードでは、手動で、Loosen プロパティを調整できます。既定では Auto モードが選択され、Loosen プロパティが自動的に設定されます。 |
|
Loosen |
スタビライズの効果を小さくし、効果が強くならないようにします。 |
|
Recovery Time Mode |
Off に設定すると、Recovery Time プロパティが無効になります。既定では Auto モードが選択され、Recovery Time が自動的に計算されます。Recpvery Time をカスタマイズするには、User モードを選択します。 |
|
Recovery Time |
スタビライズのロックを解除してから、足が新しい位置に移動するのにかかるフレーム数を設定します。 |
Damping プロパティの設定
Damping プロパティの設定では、ヒップおよび足首の方向をダンピングしたり、さまざまなダンピング位置の設定を定義することができます。
Damping プロパティの設定について、次の表で説明します。
|
Damping プロパティの設定 |
説明 |
|---|---|
|
Orientation Damping Mode |
Off に設定すると、Orientation Damping が無効になります。 User に設定すると、ヒップおよび足首の方向のダンピング値を手動で定義できます。 Auto に設定すると、Orientation Damping が自動的に定義されます。
注: Auto は既定で設定されています。
|
|
Orientation Damping |
ヒップと足首の向きをダンプできます。 |
|
Position Damping Mode |
Off に設定すると、Position Damping が無効になります。 User に設定すると、Position Damping 値を手動で定義できます。 Auto に設定すると、Position Damping が自動的に定義されます。
注: Auto は既定で設定されています。
|
|
Position Damping |
Position Damping は、急激な動きの変化を防ぎ、ピークやフィルタ ノイズを除去します。 |
|
Damping Memory Mode |
Off に設定すると、Damping Memory が無効になります。 User に設定すると、ダンピングが適用される時間を手動で定義できます。 Auto に設定すると、Damping Memory が自動的に定義されます。
注: Auto は既定で設定されています。
|
|
Damping Memory |
ヒップと足にダンピングが適用される時間(単位はフレーム数)を指定します。 |
|
Wrist Peak Sensitivity Mode |
Off に設定すると、Wrist Peak Sensitivity が無効になります。 User に設定すると、急激な手首の動きに対する感度レベルを手動で定義できます。 Auto に設定すると、Wrist Peak Sensitivity が自動的に定義されます。
注: Auto は既定で設定されています。
|
|
Wrist Peak Sensitivity |
急激な動きに対する手首の感度を指定します。 |
|
Hips Peak Sensitivity Mode |
Off に設定すると、Hips Peak Sensitivity が無効になります。 User に設定すると、急激なヒップの動きに対する感度レベルを手動で定義できます。 Auto に設定すると、Hips Peak Sensitivity が自動的に定義されます。
注: Auto は既定で設定されています。
|
|
Hips Peak Sensitivity |
急激な動きに対するヒップの感度を指定します。 |
|
Ankle Peak Sensitivity Mode |
Off に設定すると、Ankle Peak Sensitivity が無効になります。 User に設定すると、急激な足首の動きに対する感度レベルを手動で定義できます。 Auto に設定すると、Ankle Peak Sensitivity が自動的に定義されます。
注: Auto は既定で設定されています。
|
|
Ankle Peak Sensitivity |
急激な動きに対する足首の感度を指定します。 |