ここでは、Mia の手がフロア(床)に触れたときにリアルに反応するように、手のフロア コンタクトを定義します。
手とフロア コンタクト マーカーを調整するには:
- Viewer ウィンドウで、さまざまなカメラ ビューを使用して Mia の右手または左手にパン(
 または[Shift]キーを押しながらドラッグ)またはズーム(
または[Shift]キーを押しながらドラッグ)またはズーム( または[Ctrl]キーを押しながらドラッグ)します。
または[Ctrl]キーを押しながらドラッグ)します。 - Navigator ウィンドウの Character Settings ペインにある Character Properties 領域で、Property View メニュー オプションが Control Rig (Type) に設定されていることを確認します。

- Navigator ウィンドウの Character Settings ペインにある Floor Contacts グループで、Hands Floor Contact と Fingers Floor Contact をアクティブにします。

Hands Floor Contact、Feet Floor Contact、Fingers Floor Contact がアクティブにされた状態
- Hands Floor Contact Setup オプションを展開します。
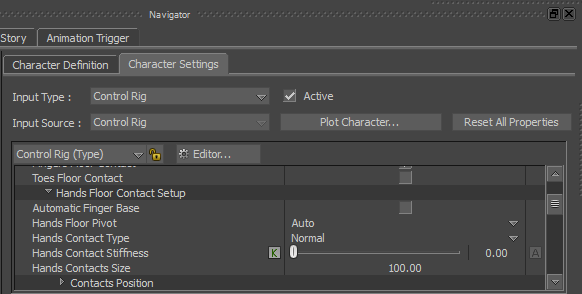
既定では Hands Contact Type は Normal に設定されており、手には 6 個のフロア コンタクト マーカが割り当てられます。このオプションを Wrist に変更すると、それぞれの手に基本的な制御のための 4 個のフロア コンタクト マーカーが提供されます。
- Hands Contact Type メニューをクリックします。
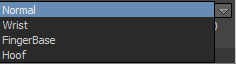
- Wrist を選択します。
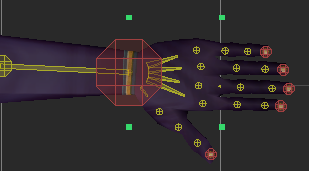
- 次の図に示すように、手の後部のマーカを手首に、前部のマーカを指(親指以外)の付け根に位置合わせします。
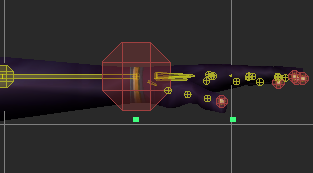
- さらに、次の図に示すように、後部のマーカを Y 軸に移動して、手のひらの付け根に位置合わせします。
注: この手順は、前の手順を完了していることを前提としています。
詳細は、「足のフロア コンタクト マーカを調整する」を参照してください。