Otwórz okno dialogowe Kąt GAMMA służące do zmiany położenia lokalnych osi przekroju pręta za pomocą jednej z poniższych metod:
- Wybierz menu Geometria / Charakterystyki / Kąt Gamma.
- Kliknij przycisk
 .
.
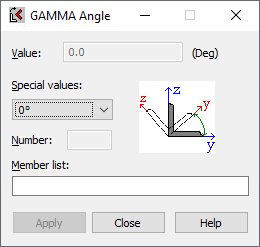
Aby zdefiniować kąt GAMMA, należy:
- Wybrać pręty, w przypadku których należy zmienić położenie lokalnego układu współrzędnych. Można wpisać numery prętów w polu Lista prętów lub wybrać pręty graficznie na ekranie.
- Określić wartość kąta Gamma.
- Kliknij przycisk Zastosuj.
Wartość kąta Gamma można zdefiniować na jeden z poniższych sposobów:
- Wpisując/wybierając wartość liczbową kąta dla wybranych prętów (pola Wartość lub Wartości specjalne).
- Wskazując węzeł (opcja Węzeł w polu Wartości specjalne), który wraz z węzłami pręta definiuje główną płaszczyznę zginania przekroju pręta.
- Wskazując pręt (opcja Położenie w polu Wartości specjalne oraz opcja Numer). Wybrane pręty mają być ustawione w taki sposób, że jedna z linii przekroju poprzecznego osi głównych jest prostopadła do osi podłużnej wyróżnionego pręta. Ta opcja jest przydatna, gdy ustawiane są pręty płatew dachu. Kolejne etapy ustalania kąta Gamma dla prętów dachu konstrukcji pokazano na poniższych grafikach.
|
Wyjściowe położenie prętów |
|
Do definicji kąta Gamma wybrane zostaną następujące pręty:
|
|
Położenie prętów po zdefiniowaniu kąta gamma. |
Przyjmuje się dodatkowo, że dodatni kąt jest określony zgodnie z regułą śruby prawoskrętnej.
Uwaga: Dla ram 3D kąt gamma może przyjmować wszystkie wartości z zakresu między (– 360°, 360°). Dla konstrukcji płaskich kąt gamma musi być wielokrotnością kąta 90°. Pręty wchodzące w skład konstrukcji płaskich można obracać jedynie o kąty: ±90°, ±180° lub ±270°. Jeżeli dla konstrukcji 2D zdefiniowana zostanie inna wartość kąta GAMMA, to program Robot automatycznie dokona dodatkowy obrót, aby kąt GAMMA był wielokrotnością kąta 90 stopni.
Przykłady definiowania różnych wartości kąta Gamma dla prętowej konstrukcji przestrzennej pokazano na poniższym rysunku.
Uwaga: Obrót układu lokalnego (dla wszystkich typów konstrukcji z wyjątkiem ramy 3D, powłoki i konstrukcji objętościowej) odnosi się tylko do położenia przekroju, natomiast nie działa dla obciążeń w układzie lokalnym. Obciążenia w układzie lokalnym odnoszą się zawsze do początkowego położenia układu. Dla ramy 3D, powłoki i konstrukcji objętościowej obrót układu lokalnego powoduje również obrót obciążenia, o ile było ono zdefiniowane w układzie lokalnym.
Patrz również: