![]()
-
Selecione o bípede >
 painel de Movimento > Implementação bípede >
painel de Movimento > Implementação bípede >  (Modo passos) > Implementação da criação de passos >
(Modo passos) > Implementação da criação de passos >  (Correr) >
(Correr) >  (Criar vários passos) > Criar vários passos: Ccaixa de diálogo de correr
(Criar vários passos) > Criar vários passos: Ccaixa de diálogo de correr
Esta caixa de diálogo é exibida quando Correr é selecionado primeiro na Implementação de criação de passos, em seguida, clique em Criar vários passos.
Interface
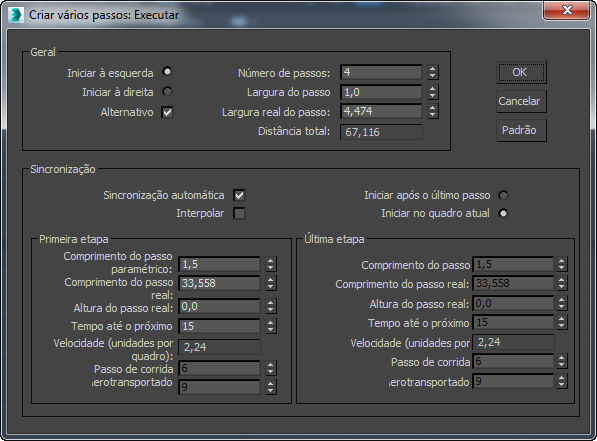
Grupo geral
- Início à esquerda inicia a sequência de passos com um passo à esquerda.
- Início à direita inicia a sequência de passos com um passo à direita.
- Alternar
- Ativar para alternar entre passos à direita e à esquerda. Quando esta caixa de seleção for desativada, todos os passos serão para a direita ou para a esquerda, criando o efeito de corrida saltitante em um pé.
- Número de passos
- Determina o número de novos passos a criar.
- Largura do avanço paramétrico
- Define a largura do avanço como uma porcentagem da largura da pelve.
O valor 1.0 produz uma largura de avanço igual à largura da pelve. O valor 3.0 produz um avanço amplo, de gingado. As alterações desta configuração mudam automaticamente a largura de avanço real.
Paramétrico descreve o parâmetro considerando a anatomia do bípede, e real descreve o valor em unidades do 3ds Max.
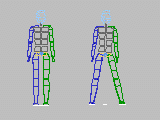
Largura de avanço = 1 e largura de avanço = 3
- Largura de avanço real
- Define a largura de avanço em unidades de modelagem. As alterações dessa configuração alteram automaticamente a Largura do passo paramétrico.
- Distância total
- Exibe a distância total que os passos percorrem com as configurações atuais. Este valor não pode ser alterado diretamente.
Grupo de sincronização
- Sincronização automática
-
Define os parâmetros de sincronização automaticamente.
A Sincronização automática afeta os seguintes parâmetros de sincronização para a marcha de Corrida:
- Passo da Corrida, no ar
Quando a sincronização automática está selecionada, estes parâmetros ajustam-se automaticamente a valores razoáveis. É possível controlar a sequência de passos ajustando o Comprimento da passada e o Tempo para os próximos parâmetros de passos.
Quando a Sincronização automática está desativada, é possível controlar a sequência de passos ajustando os parâmetros de sincronização de marcha; contudo, não é possível alterar o parâmetro de tempo para o próximo passo.
- Passo da Corrida, no ar
- Interpolar
-
Controle da aceleração e desaceleração da série de passos. Quando esta caixa está selecionada, ativa-se um segundo conjunto de parâmetros de passo em Último passo.
O bípede cria os passos começando com os valores de parâmetros em Primeiro passo e finalizando com os valores dos parâmetros em Último passo.
Mediante a interpolação entre os dois, o bípede produz uma série de passos que se altera ao longo do tempo.
Quando Interpolar for desativada, o parâmetro Último passo ficará acinzentado. O bípede cria todos os passos usando apenas os parâmetros em Primeira etapa.
- Iniciar após o último passo anexa os passos recém-criados no final da sequência de passos existente.
- Iniciar no quadro atual insere os passos recém-criados no quadro atual após a sequência de passos existente, permitindo um intervalo de tempo antes que os passos iniciem novamente.
Grupos Primeiro passo e Último passo
- Comprimento de avanço paramétrico
- Define o comprimento de avanço para os novos passos como uma porcentagem do comprimento da perna do bípede. O valor padrão de 1,5 fornece uma passada típica de corrida.
O valor de 1.0 produz um comprimento de avanço igual ao comprimento da perna, fazendo com que o bípede se estique um pouco para alcançar o próximo passo. Um valor de 0,0 fará o bípede correr no local. Um comprimento de passada de valor negativo fará o bípede correr para trás.
Quando um bípede corre para trás, ele não apenas reverte o movimento para a frente mas também mantém a sequência correta do estado do pé, com os dedos dos pés tocando o chão primeiro, seguidos pelo calcanhar.
O ajuste automático do comprimento de avanço altera o valor do comprimento de avanço real.
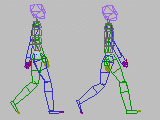
Comprimento de avanço = 0,75 e comprimento de avanço = 1
- Comprimento de avanço real
- Define o comprimento da passada para os novos passos em unidades 3ds Max.
As mesmas regras se aplicam ao Comprimento do passo paramétrico (descrito acima).
Ajustar o comprimento de avanço real muda automaticamente o valor do comprimento de avanço paramétrico.
Altura de avanço = 5 unidades
- Altura de avanço real
- Define a elevação ou a queda entre passos. Você pode usar este parâmetro para criar um conjunto de passos subindo ou descendo uma rampa ou uma escadaria.
O valor da altura de avanço real é a diferença de altura em unidades entre cada um dos passos novos. Passo com valor positivo sobe e com valor negativo, desce.
- Tempo até o próximo passo
- Especifica o número de quadros em cada ciclo de movimento do pé. Um ciclo começa com o quadro em que o pé do bípede toca o solo, continua à medida que o pé se eleva e move e termina com o quadro anterior ao do pé tocando o solo novamente. Este parâmetro somente é ativado se a sincronização automática está ativada.
- Velocidade
- Exibe o número de unidades que o bípede irá mover por quadro. Ela é alterada em resposta às mudanças nos outros parâmetros, mas não pode ser ajustada diretamente.
Os dois parâmetros seguintes somente são ativados quando a sincronização automática está desativada. Você pode utilizar estes parâmetros em vez da sincronização automática para controlar a velocidade do movimento adiante através da série de passos.
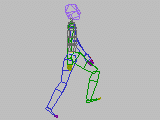
- Passo da Corrida
- Especifica o número de quadros em que cada passo estará no solo durante a corrida.
Quanto maior o número, maior tempo o pé do bípede permanece em contato com o solo e, consequentemente, menor a velocidade do movimento de corrida.
Os passos 2 e 3 estão no solo por 5 quadros cada
- Aerotransportados
- Especifica o número de quadros em que o corpo estará no ar entre os passos.
Quanto maior o número, mais tempo o bípede paira no ar para cada passo e, consequentemente, menor a velocidade do movimento de corrida.