Você pode incluir componentes estáticos no arquivo .mtd, tais como um suporte de ferramenta, para que seja verificado quanto a colisão.
Quando você inclui um componente estático em verificação de colisão, o PowerMill reconhece que o componente não possui um eixo de movimento e somente verifica quanto a colisão com componentes de eixo (os componentes móveis de uma máquina ferramenta, incluindo a mesa rotativa) e não com outros componentes estáticos.
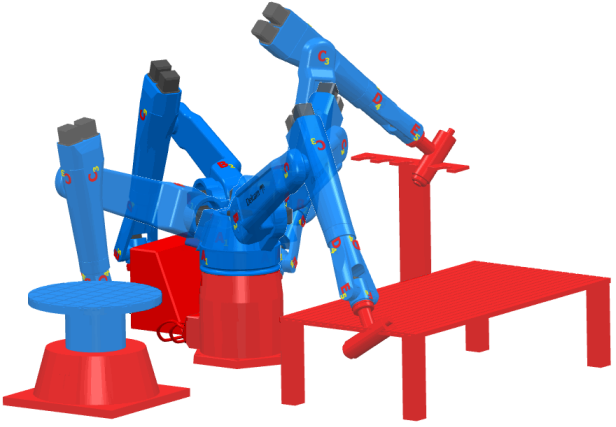
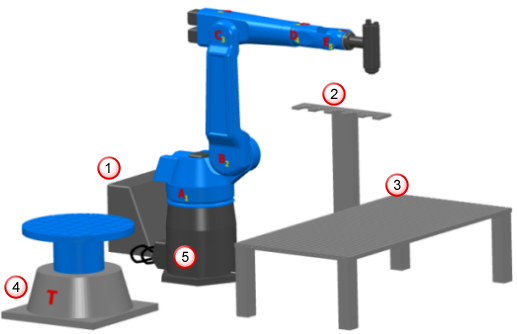
Este exemplo mostra como adicionar os seguintes componentes para que sejam verificados quanto a colisão:
- Controle do robô

- Suporte da ferramenta

- Mesa

- Base da mesa rotativa

- Base do robô

Você precisa especificar um atributo NAME para cada um dos componentes estáticos, pois o PowerMill verifica quanto a colisão componentes com um atributo NAME.
- Abra o arquivo Robot_cell.mtd num editor de XML. Este exemplo utiliza o NotePad++.
Dentro do arquivo .mtd, cada componente estático é definido numa seção própria (referida como elementos pai no XML). Cada componente estático é identificado por um comentário, por exemplo: <!-- The controller is static -->, seguido pelo elemento filho <machine_part>.
- Edite o elemento <machine_part> associado ao controlador inserindo o atributo NAME="RobotCellController", de forma que o elemento seja exibido como: <machine_part NAME="RobotCellController">.
- Edite o elemento <machine_part> associado ao suporte da ferramenta inserindo o atributo NAME="RobotCellTool", de forma que o elemento seja exibido como: <machine_part NAME="RobotCellTool">.
- Edite o elemento <machine_part> associado à mesa inserindo o atributo NAME="RobotCellTable", de forma que o elemento seja exibido como: <machine_part NAME="RobotCellTable">.
- Edite o elemento <machine_part> associado à base da mesa rotativa inserindo o atributo NAME="RotaryTableBase", de forma que o elemento seja exibido como: <machine_part NAME="RotaryTableBase">.
- Edite o elemento <machine_part> associado à base do robô inserindo o atributo NAME="RobotBase", de forma que o elemento seja exibido como: <machine_part NAME="RobotBase">.
- Salve o arquivo .mtd.
Cada componente estático agora é verificado quanto a colisão.