创建行进路径时,Revit 会分析当前视图,并计算最佳(最短)路径。在计算过程中,行进路径会避开识别为障碍物的类别(在设置中定义),并会考虑人体的常规宽度以及行走时的身体摆动。
行进路径分析基于 Simulex 分析引擎。它分 4 个步骤执行:
- 定义网格并生成初步布线。
- 沿初步布线查找最近的障碍物。
- 使用角捕捉点来生成修改的路径。
- 偏移障碍物来生成最佳的“行走”路径。

这些步骤是分析的内部过程。以下部分介绍了阐明如何生成路径线的步骤。
生成布线
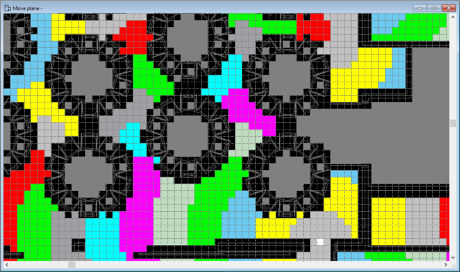
为了开始行进路径分析,Revit 会将网格应用于平面视图。网格分辨率固定为 0.2 米。给予每个网格单元一个与路径终点之间的距离有关的值。图像中的颜色指示距离范围。
包含定义为障碍物的类别的单元不在考虑之内(在图像中显示为黑色)。 如果某个单元的两侧与这些删除的单元相邻,则该单元也不在考虑之内。下图显示了一些表格之间的这种情况。当空间非常狭窄时,该情况可能会影响分析。
| 网格和距离 |
|
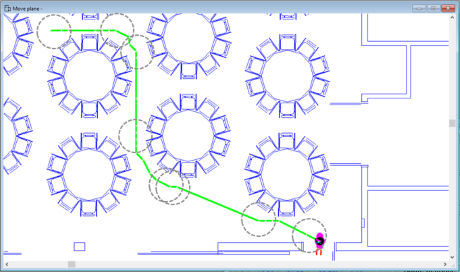
基于这些初始计算,Revit 生成一个初步路径,沿可能的最短路径创建穿过单元中心点的节点。使用自定义形式的 A* 算法确定最短的无阻碍路径。
| 初步路径 |

|
标识初步路线附近的障碍物
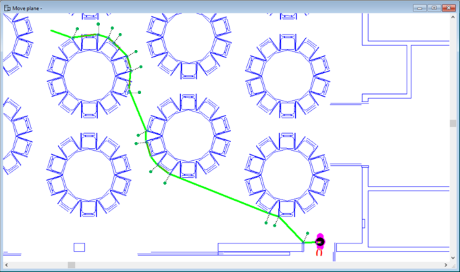
为了生成更佳路径,Revit 会标识初步路径附近的障碍物。要查找附近的障碍物,请沿初步路径在每个节点处放置半径为 0.3 米的圆。障碍物与圆的最近交点将标识为修改路径的角捕捉点。
| 定位附近障碍物 |

|
为了捕获其他角捕捉点,Revit 会沿初步路径执行另一次传递。在半径为 0.3 米的圆未与障碍物相交的任何节点处,半径为 0.566 米的较大圆用于进一步查找可能的障碍物。
| 定位附近障碍物第二次传递 |
|
生成修改路径
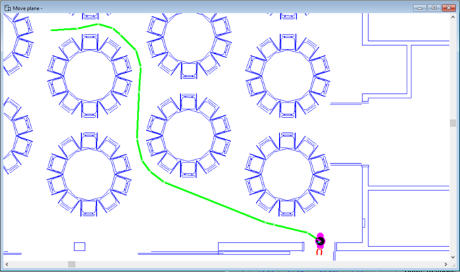
通过使用这些角捕捉点,Revit 可生成一条修改的路径,跟随沿初步路径尽可能靠近障碍物的布线。此修改路径会成为生成最终行进路径的基础。
| 修改路径 |

|
偏移最优行进路径
Revit 将修改路径上的每个节点偏离障碍物 0.3 米(身体半径 0.25 米,身体摆动 0.05 米)。偏移从入口/出口角度到节点 90° 投影,偏移点之间最小为 30°。
| 身体宽度偏移 |
|
合并非常接近的偏移点(小于 0.2 米)以使最终路径平滑。Revit 使用偏移点绘制最终的优化路径。
| 创建最终行进路径 |
|