In diesem Beispiel wird gezeigt, wie Sie die Kollisionsgruppe in der Datei Robot_One_CGroup.mtd in vier Kollisionsgruppen aufteilen.
Sie müssen ein NAME-Attribut für die A-, B-, D- und F-Achsenkomponenten angeben, da PowerMill eine neue Kollisionsgruppe für jede Achsenkomponente mit einem NAME-Attribut erstellt.
Achsenkomponenten ohne NAME-Attribut werden in die Kollisionsgruppe aufgenommen, die mit der vorherigen Achsenkomponente mit einem NAME-Attribut verknüpft ist. Wenn keine NAME-Attribute für die Achsenkomponenten C und E angegeben werden, wird C in dieselbe Kollisionsgruppe wie B aufgenommen und E wie D.
Teilen Sie die Kollisionsgruppe in vier Kollisionsgruppen auf:
- Öffnen Sie die Datei Robot_One_CGroup.mtd in einem XML-Editor. Dieses Beispiel verwendet NotePad ++.
Der Kommentar <! --The arm is controlled by 6 rotary axes --> bezeichnet den Beginn der kinematischen Folge. Unterhalb des Kommentars werden die sechs Achsenkomponenten, aus denen der Roboter zusammengesetzt ist, in einem eigenen Abschnitt (in der XML-Sprache als übergeordnetes Element bezeichnet) definiert.
Jede Achsenkomponente beginnt mit dem untergeordneten Element <machine_part>
 . Sie können bestimmen, welche Achsenkomponente der Schnitt durch die Achsadresse
. Sie können bestimmen, welche Achsenkomponente der Schnitt durch die Achsadresse  definiert.
definiert.

- Ändern Sie das Element <machine_part>, das mit der A-Achse verknüpft ist, indem Sie das Attribut NAME="Schulter" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="Schulter">.
- Ändern Sie das Element <machine_part>, das mit der B-Achse verknüpft ist, indem Sie das Attribut NAME="Oberarm" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="Oberarm">.
- Ändern Sie das Element <machine_part>, das mit der D-Achse verknüpft ist, indem Sie das Attribut NAME="Unterarm" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="Unterarm">.
- Ändern Sie das Element <machine_part>, das mit der F-Achse verknüpft ist, indem Sie das Attribut NAME="Kopf" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="Kopf">.
Die Elemente <machine_part> für C- und E-Achsenkomponenten sollten keine NAME-Attribute enthalten.
- Speichern Sie die .mtd Datei.
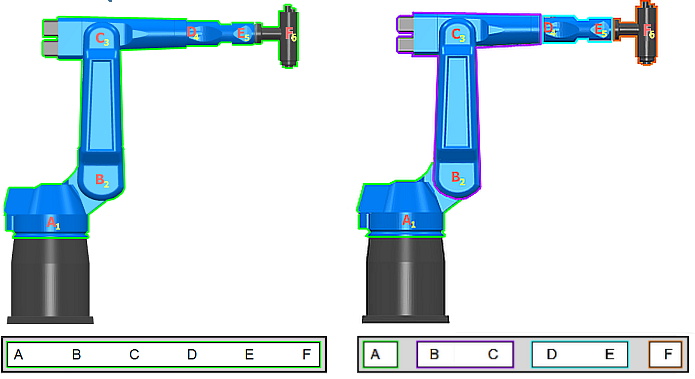
Durch das Eingeben von NAME-Attributen in die Elemente <machine_part> haben Sie die vorhandene Kollisionsgruppe in vier Kollisionsgruppen aufgeteilt:
- Schulter (mit der A-Achsenkomponente)
- Oberarm (mit der B- und C-Achsenkomponente)
- Unterarm (mit der D- und E-Achsenkomponente)
- Kopf (mit der F-Achsenkomponente)