Sie können statische Komponenten in die .mtd Datei aufnehmen, z. B. einen Werkzeughalter, damit dieser auf Kollisionen geprüft wird.
Wenn Sie eine statische Komponente in die Kollisionsprüfung aufnehmen, erkennt PowerMill, dass die Komponente keine Bewegungsachse hat, und führt die Kollisionsprüfung nur gegen Achsenkomponenten (die beweglichen Komponenten einer Werkzeugmaschine, einschließlich des Drehtisches) und nicht gegen andere statische Komponenten durch.
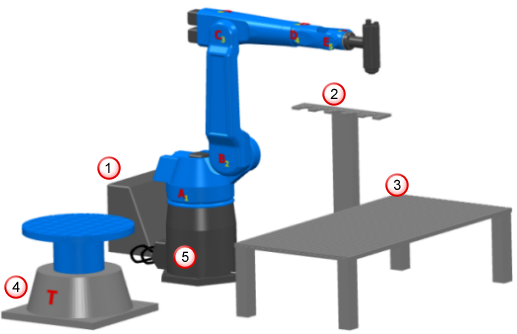
Dieses Beispiel zeigt, wie Sie die folgenden Komponenten hinzufügen, sodass sie auf Kollisionen geprüft werden:
- Robotersteuerung

- Werkzeughalter

- Tisch

- Basis des Drehtisches

- Roboterbasis

Sie müssen ein NAME-Attribut für alle statischen Komponenten angeben, da PowerMill Komponenten mit einem NAME-Attribut auf Kollisionen prüft.
- Öffnen Sie die Datei Robot_cell.mtd in einem XML-Editor. Dieses Beispiel verwendet NotePad++.
Innerhalb der .mtd Datei wird jede statische Komponente in einem eigenen Abschnitt definiert (in XML als übergeordnete Elemente bezeichnet). Jede statische Komponente wird durch einen Kommentar identifiziert, z. B.: <!-- The controller is static -->, gefolgt vom untergeordneten Element <machine_part>.
- Ändern Sie das Element <machine_part>, das mit dem Controller verknüpft ist, indem Sie das Attribut NAME="RobotCellController" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="RobotCellController">.
- Ändern Sie das Element <machine_part>, das mit dem Werkzeughalter verknüpft ist, indem Sie das Attribut NAME="RobotCellTool" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="RobotCellTool">.
- Ändern Sie das Element <machine_part>, das mit dem Tisch verknüpft ist, indem Sie das Attribut NAME="RobotCellTable" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="RobotCellTable">.
- Ändern Sie das Element <machine_part>, das mit der Basis des Drehtisches verknüpft ist, indem Sie das Attribut NAME="RotaryTableBase" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="RotaryTableBase">.
- Ändern Sie das Element <machine_part>, das mit der Roboterbasis verknüpft ist, indem Sie das Attribut NAME="RobotBase" eingeben, sodass das Element wie folgt lautet: <machine_part NAME="RobotBase">.
- Speichern Sie die .mtd Datei.
Jede statische Komponente wird jetzt auf Kollisionen geprüft.