Im ersten Schritt erstellt das Automatisierungswerkzeug die analytischen Elemente für die ausgewählten physikalischen Tragwerksobjekte. Das erstellte Berechnungsmodell folgt der Konstruktionsabsicht anhand einer regelbasierten Automatisierungslogik. Die Objekte werden an Projektrastern und -ebenen ausgerichtet.
Diese Regeln werden automatisch angewendet, und Sie können ihre Einstellungen mit ihren Parametern anpassen. Diese Regeln analysieren die Auswahl global.
Ausrichten an Raster
Das ausgewählte physikalische Berechnungsmodell wird vom Automatisierungswerkzeug analysiert, um jede dominante Richtung zu ermitteln.
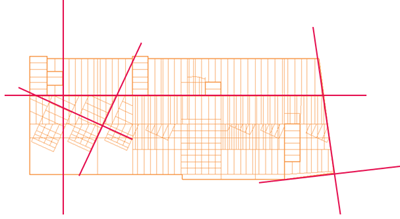
Für jede dominante Richtung werden die ausgewählten Tragwerkselemente basierend auf ihren relativen Versätzen gruppiert.

Für jede identifizierte Gruppe wird ein virtuelles Raster berechnet. Dieses virtuelle Raster wird als vertikale Ausrichtungsreferenz verwendet, an der alle Elemente in der Gruppe in Ebene ausgerichtet werden.

Wenn ein Modellraster diese Gruppe überlappt, wird es als vertikale Referenz betrachtet, an der alle Elemente der Gruppe in Ebene ausgerichtet werden.

Nachdem Elemente auf das nächstliegende virtuelle Raster projiziert wurden, werden ihre Enden am Schnittpunkt der virtuellen Raster ausgerichtet, die innerhalb der berechneten Toleranz gefunden werden.
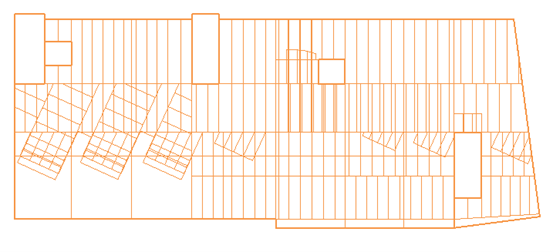
Ausrichten an Ebenen
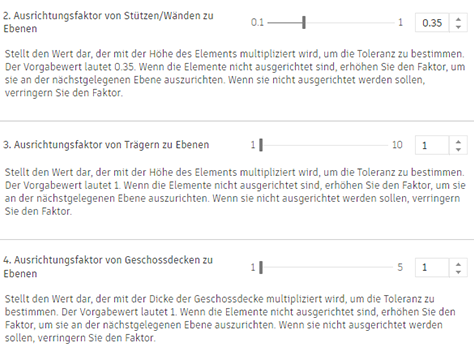
Bei der Ausrichtung an der Vertikalen sucht jedes Modellelement nach einer Ebene innerhalb einer Toleranz. Wenn eine Ebene innerhalb dieser Toleranz gefunden wird, wird die analytische Darstellung dieses Elements an dieser Ebene ausgerichtet.

- Für Träger ist dies die Querschnittshöhe.
- Für Geschossdecken ist dies die Dicke.
- Für Stützen und Wände ist dies ihre Höhe.
- der geometrischen Achse des Trägers.
- Oberseite der Geschossdecke und Fundamentplatte.
- Ober- oder Unterseite von Wänden und Stützen.
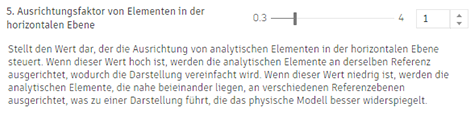
Diese Toleranz kann mit einem Faktor multipliziert werden, der in den Einstellungen des Automatisierungswerkzeugs für jeden Objekttyp vorhanden ist.
Wenn innerhalb der Toleranz des Elements mehr Ebenen erkannt werden, wird die den meisten Elementen zugewiesene Ebene als Ausrichtungsebene für alle Elemente verwendet.


Wenn Sie die Ebene angeben möchten, an der die Elemente ausgerichtet werden, aktivieren Sie den Parameter Tragwerk in den Ebeneneigenschaften.

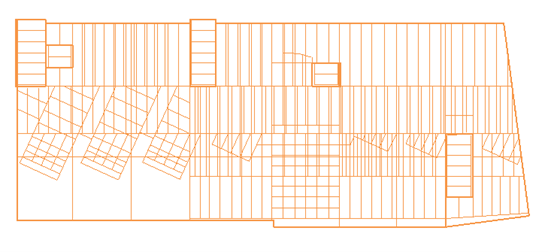
Ausrichten an geneigten Ebenen
Die geneigten Ebenen sind berechnete virtuelle Referenzen. Sie werden bestimmt, wenn das Automatisierungswerkzeug einen geneigten Sparren mit einem Winkel zur Horizontalen von weniger als 35 Grad identifiziert.

Die analytische Darstellung dieses Sparrens und aller analytischen Elemente, deren physische Gegenstücke mit diesem Sparren in Kontakt sind, werden an dieser Ebene ausgerichtet.