Cet exemple vous montre comment séparer le groupe de collision dans le fichier Robot_One_CGroup.mtd en quatre groupes de collisions.
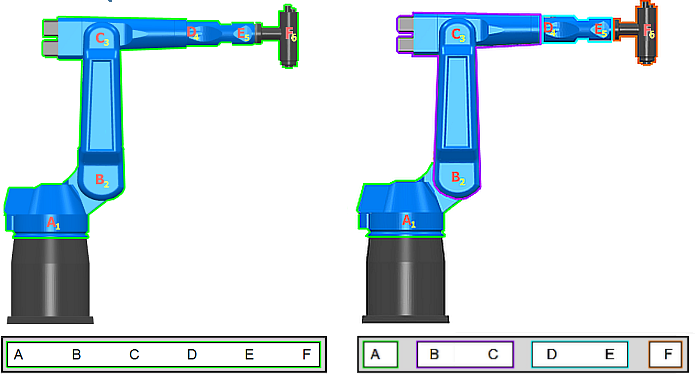
Vous devez spécifier un attribut NAME pour les composants d'axe A, B, D et F, étant donné que PowerMill crée un nouveau groupe de collision pour chaque axe avec un attribut NAME.
Les composants d'axe sans un attribut NAME sont inclus dans le groupe de collision associé avec le composant d'axe précédent avec un attribut NAME. En ne spécifiant pas les attributs NAME pour les composants d'axe C et E, C est inclus dans le même groupe de collision que B et E avec D.
Séparer le groupe de collision en quatre groupes de collision :
- Ouvrir Robot_One_CGroup.mtd dans un éditeur XML. Cet exemple utilise NotePad ++.
Le commentaire <! --The arm is controlled by 6 rotary axes --> indique le début de la chaîne cinématique. Sous le commentaire, les six composants d'axe qui composent le robot sont définis dans leurs propres sections (faisant référence à un élément parent en langage XML).
Chaque section de composant d'axe démarre par l'élément enfant <machine_part>
 . Vous pouvez identifier quel composant d'axe la section définit-elle par l'adresse de l'axe
. Vous pouvez identifier quel composant d'axe la section définit-elle par l'adresse de l'axe  .
.

- Editer l'élément <machine_part> associé à l'axe A en entrant l'attribut NAME="Epaulement", l'élément lit donc : <machine_part NAME="Epaulement">.
- Editer l'élément <machine_part> associé à l'axe B en entrant l'attribut NAME="Bras supérieur", l'élément lit donc : <machine_part NAME="Bras supérieur">.
- Editer l'élément <machine_part> associé à l'axe D en entrant l'attribut NAME="Avant-bras", l'élément lit donc : <machine_part NAME="Avant-bras">.
- Editer l'élément <machine_part> associé à l'axe F en entrant l'attribut NAME="Tête", l'élément lit donc : <machine_part NAME="tête">.
Les éléments <machine_part> pour les composants d'axe C et E ne devraient pas avoir d'attributs NAME.
- Enregistrer le fichier .mtd.
En entrant les attributs NAME dans les éléments <machine_part>, vous avez séparé le groupe de collision existant en quatre groupes de collision :
- Epaulement (contenant le composant d'axe A)
- Bras supérieur (contenant les composants d'axe B et C)
- Avant-bras (contenant les composants d'axe D et E)
- Tête (contenant le composant d'axe F)