Vous pouvez inclure des composants statiques dans le fichier .mtd, tel qu'un porte-outil, pour qu'il soit vérifié.
Quand vous incluez un composant statique dans la vérification de collision, PowerMill reconnaît que les composants n'ont pas d'axe de mouvement et ne les vérifie que par rapport aux composants d'axe (les composants mobiles d'une machine-outil, incluant la table de rotation) et pas d'autres composants statiques.
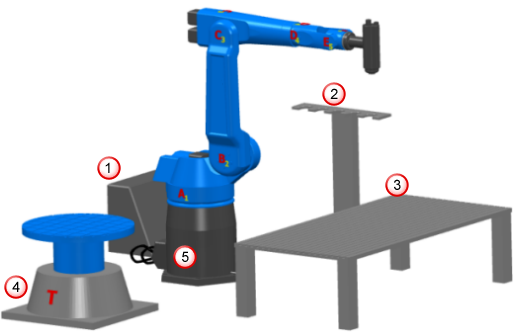
Cet exemple vous montre comment ajouter les composants suivants afin qu'ils soient vérifiés :
- Contrôle du robot

- Porte-outil

- Table

- Base de la table de rotation

- Base du robot

Vous devez spécifier un attribut NAME pour chacun des composants statiques, étant donné que PowerMill vérifie les composants avec un attribut NAME.
- Ouvrir le fichier Robot_cell.mtd dans un éditeur XML. Cet exemple utilise NotePad++.
Dans le fichier .mtd, chaque composant statique est défini dans sa propre section (faisant référence aux éléments parent en XML). Chaque composant statique est identifié par un commentaire, par exemple : <!-- The controller is static -->, suivi par l'élément enfant <machine_part>.
- Editer l'élément <machine_part> associé au contrôleur en entrant l'attribut NAME="RobotCellController", l'élément lit donc : <machine_part NAME="RobotCellController">.
- Editer l'élément <machine_part> associé au porte-outil en entrant l'attribut NAME="RobotCellTool", l'élément lit donc : <machine_part NAME="RobotCellTool">.
- Editer l'élément <machine_part> associé à la table en entrant l'attribut NAME="RobotCellTable", l'élément lit donc : <machine_part NAME="RobotCellTable">.
- Editer l'élément <machine_part> associé à la base de la table de rotation en entrant l'attribut NAME="RotaryTableBase", l'élément lit donc : <machine_part NAME="RotaryTableBase">.
- Editer l'élément <machine_part> associé à la base du robot en entrant l'attribut NAME="RobotBase", l'élément lit donc : <machine_part NAME="RobotBase">.
- Enregistrer le fichier .mtd.
Chaque composant statique est maintenant vérifié contre la collision.