最初の手順では、自動化ツールによって、選択した構造物理オブジェクトの解析要素が作成されます。作成された解析モデルは、ルールベースの自動化ロジックを通じて、エンジニアリングのマインド セットに従います。オブジェクトは、プロジェクトのグリッドとレベルに位置合わせされます。
これらのルールは自動的に適用され、パラメータを使用して設定を調整できます。これらのルールは、選択内容をグローバルに分析します。
グリッドに位置合わせする
選択した構造物理モデルは、各主要方向を特定するために自動化ツールによって解析されます。
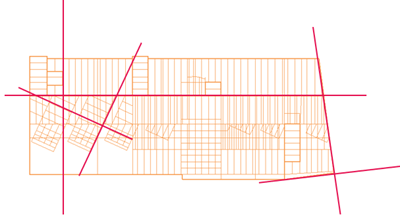
主要方向ごとに、選択した構造要素は相対オフセットに基づいてグループ化されます。

特定されたグループごとに、仮想のグリッドが計算されます。この仮想のグリッドが垂直方向の位置合わせ参照として使用され、グループ内のすべての要素が平面内で位置合わせされます。

モデルの通芯がこのグループに重なっている場合、この通芯が垂直参照であると見なされ、グループのすべての要素が平面内で位置合わせされます。


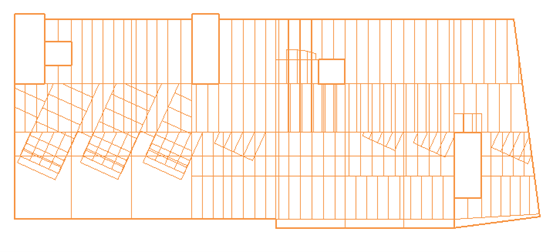
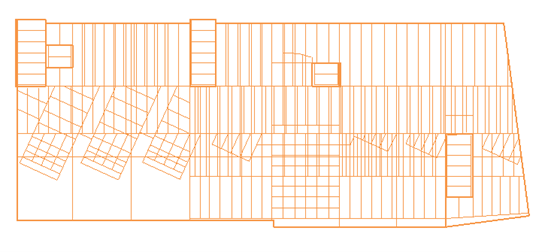
要素が最も近い仮想グリッドに投影されると、その端点は、計算された許容値内にある仮想グリッドの交点に位置合わせされます。
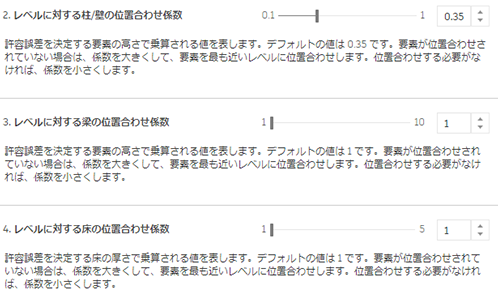
レベルに位置合わせする
垂直の位置合わせでは、各モデル要素は許容差内のレベルを探します。この許容差内でレベルが見つかった場合、この要素の解析表現はそのレベルに位置合わせされます。

- 梁の場合は、その断面の高さ。
- 床の場合、その厚さ。
- 柱と壁の場合は、その高さ。
- 梁のジオメトリ軸。
- 床およびべた基礎の上部
- 壁および柱の上部または下部。
この許容値は、各タイプのオブジェクトの自動化ツールの設定に含まれる係数で乗算できます。
要素の許容差内に複数のレベルが見つかった場合は、大多数の要素に割り当てられているレベルがすべての要素の位置合わせレベルになります。


要素を位置合わせするレベルを指定する場合は、レベルのプロパティの「構造」パラメータを確認します。

傾斜面に位置合わせする
傾斜面は仮想の参照として計算され、水平面に対する角度が 35 度未満の傾斜した垂木を自動化ツールが認識した際に決定されます。

この垂木の解析表現と、対応する物理要素がこの垂木に接触している解析要素は、すべてこの平面に位置合わせされます。