첫 번째 단계에서 자동화 도구는 선택한 구조 물리적 객체의 해석 요소를 작성합니다. 작성된 해석 모델은 규칙 기반 자동화 논리를 거친 엔지니어링 사고 방식을 따릅니다. 객체가 프로젝트 그리드 및 레벨에 정렬됩니다.
이러한 규칙은 자동으로 적용되며 해당 매개변수를 사용하여 설정을 조정할 수 있습니다. 이러한 규칙은 선택 항목을 전체적으로 분석합니다.
그리드에 정렬
선택한 구조 물리적 모델은 자동화 도구로 해석되어 각각의 주 방향을 식별합니다.
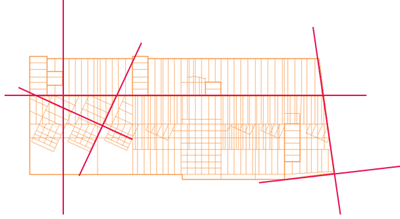
각 주 방향에 대해 선택한 구조 요소는 상대적 간격띄우기에 따라 그룹화됩니다.

식별된 각 그룹에 대해 가상 그리드가 계산됩니다. 이 가상 그리드는 그룹의 모든 요소가 평면에서 정렬되는 수직 정렬 참조로 사용됩니다.

모델 그리드가 이 그룹과 겹치는 경우, 그룹의 모든 요소가 평면에서 정렬되는 수직 참조로 간주됩니다.


요소가 가장 가까운 가상 그리드에 투영되면 요소의 끝은 계산된 공차 내에 있는 가상 그리드의 교차점에 정렬됩니다.
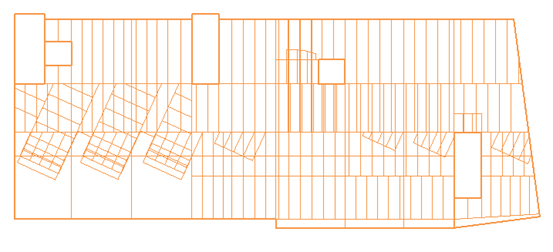
레벨에 정렬
수직 정렬의 경우 각 모델 요소가 공차 내의 레벨을 찾습니다. 이 공차 내의 레벨을 찾으면 이 요소의 해석 표현이 해당 레벨에 정렬됩니다.

- 보의 경우 횡단면 높이입니다.
- 바닥의 경우 두께입니다.
- 기둥과 벽의 경우 높이입니다.
- 보 형상 축.
- 바닥 및 기초 슬래브 상단.
- 벽 및 기둥의 맨 위 또는 맨 아래.
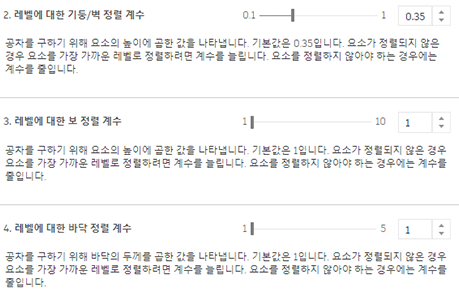
각 객체 유형에 대한 이 공차는 자동화 도구 설정에 있는 계수와 곱할 수 있습니다.
요소의 공차 내에서 더 많은 레벨이 식별된 경우 대부분의 요소에 지정된 레벨이 모든 요소에 대한 정렬 레벨이 됩니다.


요소가 정렬될 레벨을 지정하려는 경우 레벨 특성에서 "구조" 매개변수를 선택합니다.

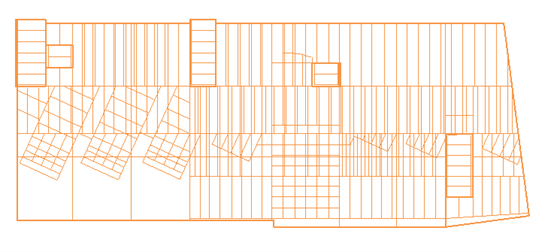
경사진 평면에 정렬
경사진 평면은 계산된 가상 참조로, 자동화 도구에서 수평 대비 각도가 35도 미만인 경사 서까래를 식별할 때 결정됩니다.

이 서까래의 해석 표현 및 물리적 해당 대상이 이 서까래와 접촉하는 모든 해석 요소가 이 평면에 정렬됩니다.