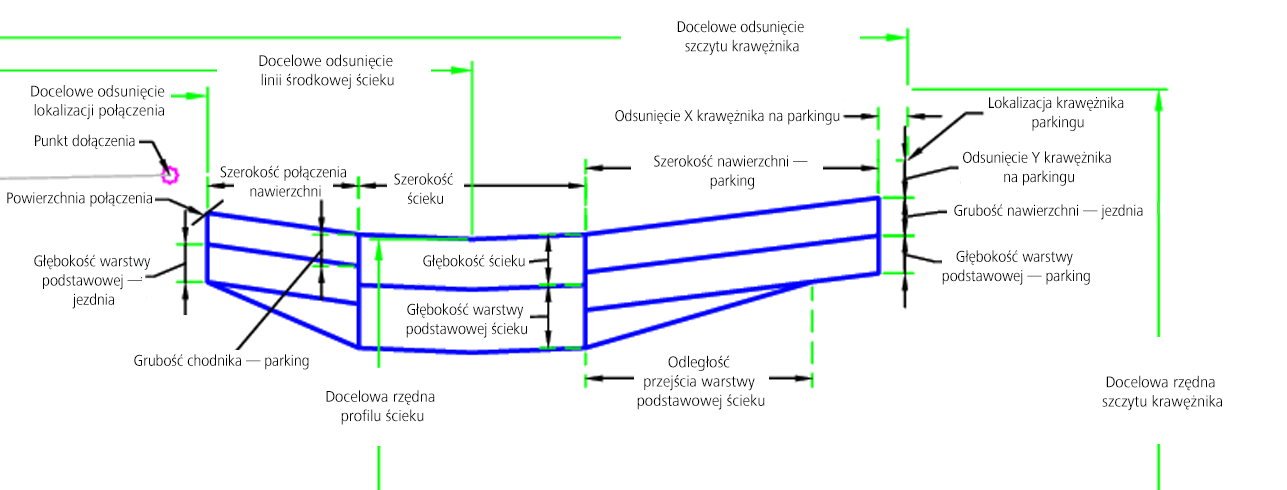
Za pomocą podzespołu ParkingAdjacentToRoad jest tworzony parking przyległy do istniejącej jezdni. Parking obejmuje utwardzony obszar istniejącej jezdni, ściek i nawierzchnię parkingu. Nawierzchnia parkingu łączy się także z proponowaną rzędną krawężnika i położeniem szczytu krawężnika.
Dołączenie
Punkt dołączenia znajduje się na środku jezdni. Komponent ten można dołączyć z lewej lub prawej strony.
Parametry wejściowe
|
Parametr |
Opis |
Rodzaj |
Wartość domyślna |
|---|---|---|---|
| Bok | Określa stronę, po której ma zostać umieszczony podzespół | Lewy/prawy | Prawy |
| Szerokość ścieku | Całkowita szerokość ścieku | Liczbowy, dodatni |
3 stopy 1 m |
| Głębokość ścieku | Głębokość ścieku | Liczbowy, dodatni |
8 cali 200 mm |
| Grubość nawierzchni — parking | Grubość nawierzchni asfaltobetonowej | Liczbowy, dodatni |
2 in 50 mm |
| Odległość przejścia warstwy podstawowej ścieku | Przejście grubszej warstwy podstawowej przy ścieku | Liczbowy, dodatni |
3 stopy 1 m |
| Odsunięcie Y krawężnika na parkingu | Odsunięcie Y krawężnika z tyłu parkingu | Liczbowy |
-0,5 stopy -0,150 m |
| Odsunięcie X krawężnika na parkingu | Odsunięcie X krawężnika z tyłu parkingu | Liczbowy |
-0,625 stopy -0,19 m |
| Szerokość nawierzchni — parking | Szerokość nawierzchni — parking | Liczbowy, dodatni |
20,5 stopy 6,25 m |
| Głębokość warstwy podstawowej ścieku | Szerokość połączenia nawierzchni | Liczbowy, dodatni |
2 stopy 0,6 m |
| Głębokość warstwy podstawowej — parking | Głębokość warstwy podstawowej pod ściekiem | Liczbowy, dodatni |
6 cali 150 mm |
| Głębokość warstwy podstawowej — jezdnia | Głębokość warstwy podstawowej — jezdnia | Liczbowy, dodatni |
10 cali 250 mm |
| Grubość nawierzchni — jezdnia | Grubość nawierzchni — jezdnia | Liczbowy, dodatni |
3 cale 80 mm |
Parametry docelowe
W tej sekcji opisano występujące w tym podzespole parametry, które można mapować do jednego lub większej liczby obiektów docelowych. Więcej informacji zawiera temat Określanie ustawień docelowych korytarza.
|
Parametr |
Opis |
Stan |
|---|---|---|
| Lokalizacja połączenia | Służy do określania szerokości połączenia od punktu dołączenia. Następujące typy obiektów można zastosować jako obiekty docelowe do określania szerokości: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Wymagany |
| Powierzchnia połączenia | Służy do określania rzędnej połączenia. Następujące typy obiektów można zastosować jako obiekty docelowe do określania powierzchni: powierzchnie. | Wymagany |
| Odsunięcie szczytu krawężnika | Służy do określania rzędnej szczytu krawężnika położenia wiązania krawężnika parkingu. Następujące typy obiektów można zastosować jako obiekty docelowe do określania rzędnej: profile, polilinie 3D, linie charakterystyczne lub figury pomiarowe. | Wymagany |
| Profil szczytu krawężnika | Służy do określania położenia odsunięcia dla krawężnika i ścieku. Następujące typy obiektów można zastosować jako obiekty docelowe do określania rzędnej: profile, polilinie 3D, linie charakterystyczne lub figury pomiarowe. | Wymagany |
| Linia środkowa ścieku | Służy do określania linii środkowej ścieku. Następujące typy obiektów można zastosować jako obiekty docelowe do określania szerokości: linie trasowania, polilinie, linie charakterystyczne lub figury pomiarowe. | Wymagany |
| Profil ścieku | Służy do określania rzędnej linii środkowej ścieku. Następujące typy obiektów można zastosować jako obiekty docelowe do określania rzędnej: profile, polilinie 3D, linie charakterystyczne lub figury pomiarowe. | Wymagany |
Przypisania logiczne czasu wykonania
Brak.
Parametry wyjściowe
|
Parametr |
Opis |
Rodzaj |
|---|---|---|
| Nachylenie pasa | Nachylenie pasa | Liczbowy |
Zachowanie
Początkowy punkt odniesienia ustawiany jest w punkcie dołączenia. Znajdowane są wartości profilu szczytu krawężnika i odsunięcia w celu określenia położenia krawędzi zewnętrznej nawierzchni parkingu. Położenie połączenia jest określane na podstawie wartości docelowej położenia połączenia. Rzędna połączenia jest znajdowana na podstawie położenia połączenia i wartości docelowej powierzchni połączenia w tym punkcie. Położenie i rzędna ścieku są określane na podstawie ustawionych wartości docelowych. Geometria ścieku jest następnie tworzona na podstawie parametrów wejściowych. Geometria połączenia nawierzchni jest tworzona na podstawie docelowych rzędnych połączenia i parametrów wejściowych. Następnie nawierzchnia parkingu jest tworzona przy użyciu wartości docelowych i parametrów wejściowych.
Działanie w trybie układu
W trybie układu ten podzespół umożliwia wyświetlenie wszystkich połączeń przy użyciu parametrów wejściowych szerokości i głębokości oraz przyjętych wartości docelowych.
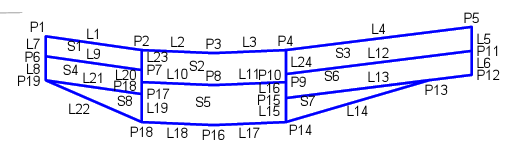
Punkt, połączenie i kody kształtu
W następującej tabeli wymieniono kody kształtów, połączeń i punktów dla tych podzespołów, do których przypisano kody. Kody kształtu, połączeń i punktów dla tych podzespołów, do których nie przypisano kodów, nie zostały uwzględnione w tej tabeli.
|
Punkt, połączenie lub kształt |
Kod |
Opis |
|---|---|---|
| P1 | Join | Położenie połączenia nawierzchni |
| P2 | Gutter_Edge | Krawędź ścieku |
| P3 | FL | Linia przepływu ścieku |
| P4 | ETW | Krawędź jezdni |
| P5 | FS | Powierzchnia końcowa |
| P12, P15, P17, P19 | Base | Warstwa podstawowa |
| L1, L4 | Top, Pave | Szczyt nawierzchni |
| L2, L3 | Top, Gutter | Szczyt ścieku |
| L9, L12 | Pavement | Grubość dna nawierzchni |
| L10, L11 | Gutter | Dno ścieku |
| L13, L14, L17, L18, L21, L22 | Datum | |
| S1, S3 | Pave | |
| S2, | Gutter | |
| S4–S6, S7, S8 | Base |
Diagram kodowania