Podzespół ConditionalHorizontalTarget2 umożliwia automatyczne zastosowanie różnych podzespołów, takich jak poszerzenie, krawężnik i ściek, rów lub rzutowanie, do zespołu w zależności od tego, czy znaleziono obiekt docelowy odsunięcia na pikiecie korytarza.
Podzespół ConditionalHorizontalTarget2 różni się od podzespołu ConditionalHorizontalTarget. Dodatkowe parametry kierunku umożliwiają wyszukanie wartości docelowych i minimalnej odległości w celu znalezienia wartość docelowych przesunięcia.
Podzespół ConditionalHorizontalTarget2 jest podzespołem specjalnego typu — podzespołem warunkowym. Podzespoły warunkowe umożliwiają automatyczne dodanie określonych podzespołów do zespołu po zaistnieniu warunków zdefiniowanych przez użytkownika.
Jeśli na przykład zespół zawiera podzespół ConditionalHorizontalTarget2, w programie AutoCAD Civil 3D przeprowadzana jest analiza pikiety w celu określenia, czy istnieje obiekt docelowy odsunięcia w określonej odległości i określonym kierunku. Odsunięcie jest ustawiane od bieżącej linii bazowej korytarza lub punktu dołączenia podzespołu. W zależności od parametrów podzespołu ConditionalHorizontalTarget2 do zespołu automatycznie dodawane są różne typy podzespołów.
Do zespołu można dodać co najmniej jeden podzespół ConditionalHorizontalTarget2, aby utworzyć proste lub złożone zachowania warunkowe. Można na przykład dodać do modelu zestaw polilinii, które pokazują położenie chodników. Ponieważ linie kończą się w miejscu przecięcia podjazdów z chodnikiem, podzespół warunkowy umożliwia dodawanie i usuwanie chodnika w zależności od obecności linii chodnika. Użycie podzespołu warunkowego eliminuje konieczność stosowania innego podzespołu do korytarza, w przypadku gdy chodnik nie jest wymagany.
W konstrukcji zespołu wyświetlanej w oknie dialogowym Właściwości zespołu na karcie Konstrukcja wskazywana jest kolejność przetwarzania podzespołów podczas tworzenia zespołu przy użyciu podzespołów ConditionalHorizontalTarget2.
Korzystając z podzespołu ConditionalHorizontalTarget2, należy pamiętać o następujących uwarunkowaniach:
- Program AutoCAD Civil 3D analizuje położenie pikiety powiązanej z podzespołem względem odsunięcia obiektu docelowego w celu określenia, czy odsunięcie zostało znalezione.
- Jeśli do modelu korytarza stosowany jest zespół zawierający podzespoły ConditionalHorizontalTarget2, wówczas do konkretnej struktury zespołu zostaną zastosowane tylko określone części zespołu.
- Ponieważ podzespół ConditionalHorizontalTarget2 używa obiektów docelowych, należy je ustawić we wszystkich podzespołach ConditionalHorizontalTarget2 przed wymodelowaniem (wygenerowaniem) korytarza. Jeśli obiekty docelowe nie zostały ustawione, zespół zwraca komunikat Nie znaleziono. Więcej informacji zawiera temat Określanie ustawień docelowych korytarza.
- W odróżnieniu od większości innych podzespołów podzespół ConditionalHorizontalTarget2 nie tworzy w trybie modelowania żadnych punktów, połączeń ani kształtów.
Dołączenie
Podzespół ten można dołączyć do dowolnego punktu dołączenia podzespołu lub zespołu. Do punktu końcowego w podzespole ConditionalHorizontalTarget2 można dołączać kolejne podzespoły.
Parametry wejściowe
|
Parametr |
Opis |
Rodzaj |
Wartość domyślna |
|---|---|---|---|
| Strona | Określa stronę, po której ma zostać umieszczony podzespół. | Lewy/prawy | Prawy |
| Szerokość układu | Określa długość linii rysowanej w celu reprezentacji tego podzespołu w trybie układu. Ten parametr w połączeniu z parametrem Nachylenie układu umożliwia określenie pozycji podzespołu ConditionalHorizontalTarget2 i dołączonych do niego podzespołów, ale nie ma wpływu na model korytarza. | Liczbowy, dodatni |
12.0 stopy 3.6 m |
| Nachylenie układu | Określa nachylenie (procent) linii rysowanej w celu reprezentacji tego podzespołu w trybie układu. Ten parametr w połączeniu z parametrem Szerokość układu umożliwia określenie pozycji podzespołu ConditionalHorizontalTarget2 i dołączonych do niego podzespołów, ale nie ma wpływu na model korytarza. | Liczbowy |
1:1 (znaleziono) -1:1 (nie znaleziono) |
| Warunek | Określa warunek dostępny dla tego podzespołu. Warunek Znaleziono przetwarzany jest wtedy, gdy na odcinku maksymalnej odległości znaleziony został obiekt docelowy odsunięcia. Warunek Nie znaleziono przetwarzany jest wtedy, gdy obiekt docelowy odsunięcia nie został ustawiony lub nie znaleziono go na pikiecie na odcinku maksymalnej odległości. | Znaleziono/Nie znaleziono | Znaleziono |
| Maksymalna odległość | Określa maksymalną szerokość, w obrębie której podzespół wyszukuje obiekt docelowy odsunięcia. Jeśli na odcinku określonej odległości nie znaleziono odsunięcia, przetwarzany jest warunek Nie znaleziono. | Liczbowy, dodatni |
9999 stóp 9999 m |
| Minimalna odległość | Określa minimalną szerokość, w obrębie której podzespół wyszukuje obiekt docelowy odsunięcia. Jeśli na odcinku określonej odległości znaleziono odsunięcie, przetwarzany jest warunek Nie znaleziono. | Liczbowy, dodatni |
0 stóp 0 m |
| Kierunek wyszukiwania | Określa kierunek wyszukiwania wartości docelowej. | Na zewnątrz/Do wewnątrz/Oba kierunki | Oba kierunki |
| Początek wyszukiwania | Określa, czy wartość odległości jest obliczana od linii trasowania linii bazowej czy od punktu dołączenia podzespołu. | Linia bazowa/Punkt dołączenia | Linia bazowa |
Parametry docelowe
W tej sekcji opisano występujące w tym podzespole parametry, które można mapować do jednego lub większej liczby obiektów docelowych. Więcej informacji zawiera temat Określanie ustawień docelowych korytarza.
|
Parametr |
Opis |
Stan |
|---|---|---|
| Odsunięcie | Linia trasowania, linia charakterystyczna, figura pomiarowa lub polilinie. Jeśli określony obiekt docelowy odsunięcia znaleziono na pikiecie, przetwarzany jest warunek Znaleziono. | Opcjonalny (jeśli nie został ustawiony, zwracany jest warunek Nie znaleziono) |
Przypisania logiczne czasu wykonania
Brak.
Parametry wyjściowe
Brak.
Zachowanie
Patrz opis poniżej.
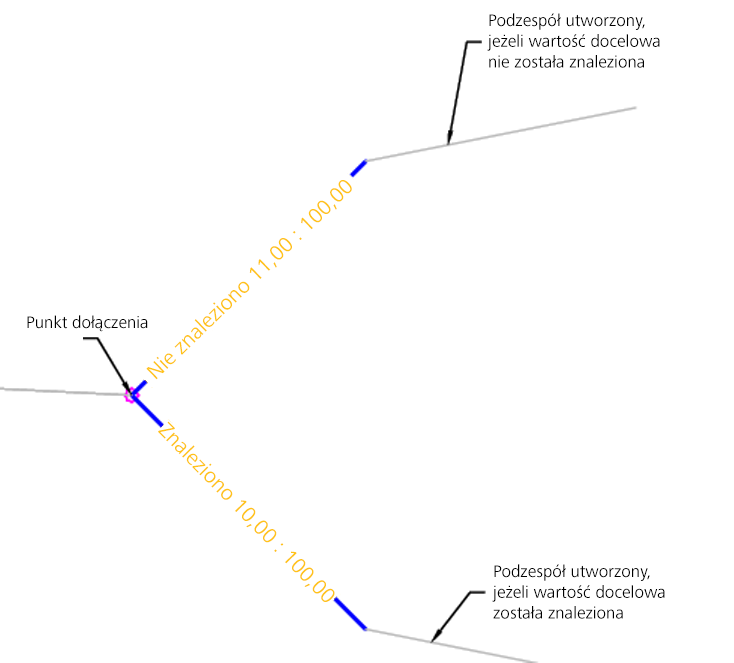
Działanie w trybie układu
W trybie układu ten podzespół powoduje narysowanie linii przy użyciu wartości parametrów wejściowych Szerokość układu i Nachylenie układu. Linia reprezentuje położenie w zespole, w którym zastosowano podzespół ConditionalHorizontalTarget2.
Punkt, połączenie i kody kształtu
W odróżnieniu od większości innych podzespołów podzespół ConditionalHorizontalTarget2 nie tworzy w trybie modelowania żadnych punktów, połączeń ani kształtów.
Schemat kodowania
Poniższy schemat kodowania przedstawia punkty i łącza tworzone w trybie układu. W trybie modelowania dla tego podzespołu nie są tworzone żadne punkty, łącza ani kody kształtów.
