O elemento RLINK, que é inserido automaticamente no lugar de um vínculo rígido definido durante os cálculos, oferece a capacidade de usar uma matriz de massa concentrada para problemas dinâmicos.
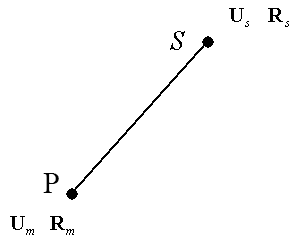
S – Nó secundário
P – Nó principal
A matriz de rigidez para o elemento apresentado no desenho acima é a seguinte:
Cms = matriz de transformação de deslocamentos do nó principal para o nó secundário ![]()
Cms trans = matriz de transformação de reações do nó secundário para o nó principal ![]()
Us = vetor de deslocamento para o nó secundário
Um = vetor de deslocamento para o nó principal
Rs = vetor de reação para o nó secundário
Rm = vetor de reação para o nó principal
diag(k) = matriz diagonal criada do vetor k, que é um vetor de rigidez atribuído a graus individuais de liberdade
Vantagens:
O elemento RLINK é tratado como um elemento finito regular, permitindo:
- Matriz de massa concentrada para problemas dinâmicos.
- Liberações em um nó secundário.
- Nós compatíveis em um nó secundário.
- Apoio rotacionado no nó principal.
Desvantagens:
Existe um número maior de graus de liberdade em um sistema. Aqueles em vínculos rígidos padrão de um nó secundário são herdados do nó principal. Os graus de liberdade em um elemento RLINK do nó principal e do nó secundário são tratados separadamente.
O condicionamento mais deficiente da matriz de rigidez pode ter um efeito adverso na convergência dos solvers iterativos.