O aplicativo PondEdit gera e modifica os arquivos que contêm os regulamentos de combinações de normas que constituem a base para a geração automática de combinações de normas no Robot e suas calculadoras.
Estes são arquivos de texto com sintaxe estritamente definida.
O PondEdit pode ser executado de forma parametrizada fornecendo um caminho de arquivo com as normas (pondedit.exe “filepath”). O arquivo que contém as normas apropriadas é aberto por padrão.
As seguintes opções podem ser selecionadas no menu.
- Arquivo – Contém as seguintes opções.
- Novo – Cria um novo documento.
- Abrir – Abre um arquivo de normas existente.
- Salvar – Salva um documento aberto.
- Salvar como – Salva um documento aberto com um novo nome.
- Sair – Finaliza o trabalho no programa.
- Preferências –Abre a caixa de diálogo de alteração de idioma.
- Ajuda – Executa o arquivo de ajuda.
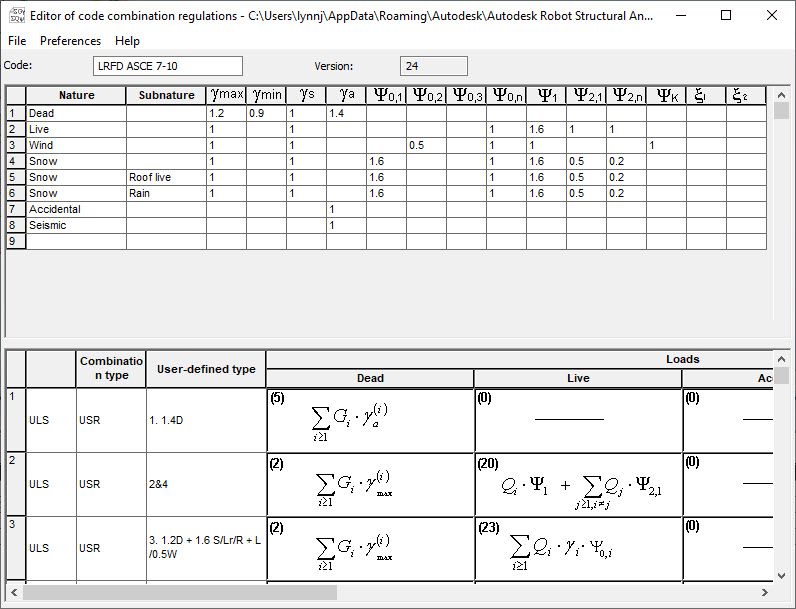
A parte superior da caixa de diálogo contém um campo que permite alterar um nome. Esse nome permite a identificação subsequente dos regulamentos. O campo somente leitura apresenta um número da versão do software com a qual as normas podem cooperar.
A parte central da caixa de diálogo exibe uma tabela onde os fatores de segurança e os fatores de simultaneidade para as naturezas e subnaturezas de carga podem ser modificados. A definição de um novo registro começa com a determinação de sua natureza. A natureza é escolhida entre sete naturezas de carga: morta, ativa, eólica, neve, temperatura, acidental e sísmica. Para cada natureza, qualquer número de subnaturezas pode ser definido (como ativa – carga de pessoas, ativa – carga do veículo e assim por diante). Um nome de subnatureza é fornecido na segunda coluna da tabela. A próxima etapa é atribuir fatores de segurança e fatores simultâneos. As colunas subsequentes oferecem 14 fatores diferentes disponíveis: γ máx γ mín γ s γ a; ψ 0,1 ψ 0,2 ψ 0,3 ψ 0,n ψ 1; ψ 2,1 ψ 2,n ψ K; ξ 1; ξ 2; respectivamente. Esses fatores geram combinações de normas apropriadas.
Após os valores do fator ou fórmulas de combinação de regulamentos terem sido modificados, o arquivo de regulamento *.rgl editado poderá ser salvo selecionando Arquivo > Salvar. O arquivo é salvo por padrão na pasta de dados do usuário (...\ Usuários \ seu_login \ AppData \ Roaming \ Autodesk \ Structural \ Common Data \ version_number \...).
Se o comando Salvar como tiver sido selecionado para salvar o arquivo de regulamento, salve o arquivo em uma das pastas listadas acima. As normas serão colocadas na lista na caixa de diálogo Preferências do trabalho.
As seguintes regras estão disponíveis para tipos de carga individuais:
- Morta (também conhecido como: ação permanente, de acordo com a nomenclatura do Eurocode).
- Ativa (também denominado como: ação variável, de acordo com a nomenclatura do Eurocode).
- Acidental.
- Sísmica.
A parte inferior da janela PondEdit define as regras de geração de combinações de normas. Na primeira coluna, as definições devem começar com a inserção do estado limite ao qual uma determinada combinação se aplica. Quatro estados de limite estão disponíveis: ULS (combinações de verificação de capacidade de carga), SLS (combinações de verificação de estado de manutenção), ACC (combinações de verificação de estado acidental) e SPC (combinações de verificação de estado especial). Depois de selecionado um estado apropriado, poderá ser definido um tipo de combinação. O tipo é uma descrição adicional que facilita a identificação subsequente de uma combinação. Há nove descrições de combinação padrão disponíveis: STD (padrão), SEI (sísmica), ACC (acidental), RAR (rara, característica), FRE (frequente); QPR (quase permanente); FUN (fundamental), SIM (simplificada) e EXCET (extrema). Se qualquer uma dessas descrições for usada, as combinações apresentadas serão atribuídas aos nomes apropriados no idioma de trabalho. Além disso, o tipo USR que permite modificar a coluna de tipo definida pelo usuário (permanente e não dependente de idioma), bem como a ausência de descrição, pode ser selecionado. As colunas restantes permitem fórmulas definidas pelo usuário para gerar combinações de normas. Isso é feito separadamente para tipos de carga morta, ativa, acidental e sísmica. As regras de geração podem ser escolhidas em um conjunto predefinido de regras.
Para combinações baseadas no Eurocode, o Robot gerará o conjunto de combinações SLS junto com três conjuntos adicionais: SLS:CHR (rara, característica), SLS:FRE (frequente), SLS:QPR (quase permanente).