Abra a caixa de diálogo Ângulo GAMA, que é usada para alterar a posição dos eixos locais de uma seção do membro, através de um dos seguintes métodos:
- Clique no menu Geometria > Propriedades > Ângulo gama.
- Clique em
 .
.
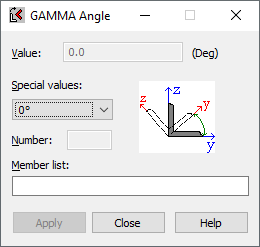
Para definir um ângulo GAMA:
- Selecione os membros para os quais deseja alterar a posição do sistema de coordenadas local. Insira os números dos membros no campo Lista de membros ou execute uma seleção gráfica.
- Insira o valor do ângulo gama.
- Clique em Aplicar.
É possível inserir um valor do ângulo gama usando um dos seguintes métodos:
- Insira ou selecione o valor numérico para o ângulo do membro selecionado (campos: Valor ou Valores especiais).
- Selecione o nó (a opção Nó no campo Valores especiais) juntamente com os nós do membro, o que define o plano da flexão principal da seção do membro.
- Selecione o membro (a opção Posição no campo Valores especiais e a opção Número). Os membros selecionados são girados de forma que um dos eixos principais da seção transversal fique perpendicular ao eixo longitudinal do membro destacado. Essa opção é útil ao definir os membros de terça do telhado. As etapas consecutivas para determinar um ângulo gama dos membros de telhado da estrutura são mostradas nas imagens a seguir.
|
Posição inicial dos membros |
|
Após definir um ângulo gama, os seguintes membros serão selecionados:
|
|
Posição dos membros após definir um ângulo gama. |
Considera-se que o ângulo positivo seja definido de acordo com a regra de giro à direita.
Nota: Para estruturas 3D, o ângulo GAMA pode ser qualquer valor no intervalo entre (-360°, 360°). Para estruturas 2D, o ângulo GAMA deve ser um múltiplo de um ângulo de 90°. Os membros em estruturas 2D podem ser rotacionados somente pelos ângulos: ±90°, ±180° ou ±270°. Para uma estrutura 2D, se um valor diferente for definido para um ângulo GAMA, o Robot executará automaticamente uma rotação adicional, de modo que o ângulo GAMA seja um múltiplo de um ângulo de 90°.
A imagem a seguir de uma estrutura de membro mostra diferentes métodos para definir valores de ângulo gama.
Nota: A rotação de um sistema local (para todos os tipos de estrutura, exceto para estruturas 3D, cascas e estruturas volumétricas) afeta somente a posição de uma seção e não as cargas em um sistema local. As cargas em um sistema local sempre correspondem às configurações iniciais do sistema. Para estruturas 3D, cascas e estruturas volumétricas, a rotação de um sistema de coordenadas local também resultará na rotação da carga se ela tiver sido definida no sistema local.
Consulte também: