活动 2:应用约束和载荷
在本活动中,您假定楼板是刚硬且平滑的。支腿可以在楼板上滑动,但在 Y 方向上保持固定。为避免桌子无限移动,您锁定一条支腿的底部。锁定这一点可允许其他支腿平动,同时避免桌子在楼板上无限移动。若要完成分析设置,您需要完成以下任务:
为四条支腿的底部分别应用不同的约束
在桌子的顶部应用载荷
使用自动接触生成器来创建粘合接触。
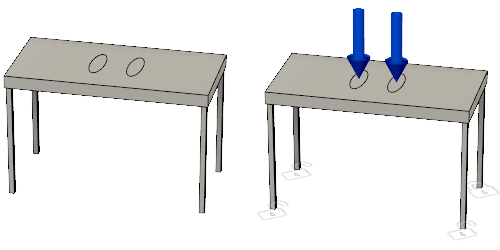
无约束或载荷的塑料桌(左侧)和具有约束和载荷的塑料桌(右侧)。
前提条件
- 活动 1 已完成。
步骤
按以下方式约束支腿:
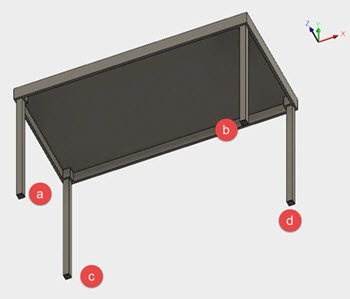
 - 在 Uy 方向上固定。
- 在 Uy 方向上固定。 - 在 Ux 和 Uy 方向上固定。
- 在 Ux 和 Uy 方向上固定。 - 在 Uy 和 Uz 方向上固定。
- 在 Uy 和 Uz 方向上固定。 - 在 Ux、Uy 和 Uz 这三个方向上均固定。
- 在 Ux、Uy 和 Uz 这三个方向上均固定。- 单击
 (“仿真”工作空间 >“设置”选项卡 >“约束”面板 >“结构约束”)以打开“结构约束”对话框。
(“仿真”工作空间 >“设置”选项卡 >“约束”面板 >“结构约束”)以打开“结构约束”对话框。 - 单击 ViewCube 的底部面,或旋转模型以使支腿底部的桌脚可见。
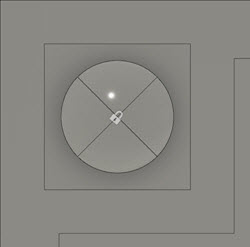
- 选择支腿 (a) 底部将接触楼板的点。请注意,该点处会显示一个锁。
- 在“结构约束”对话框中,单击“Ux”轴和“Uz”轴以取消选择它们。
注意:这会使 Uy 成为支腿 (a) 上唯一受约束的轴。 - 单击“确定”以接受约束并关闭对话框。
- 使用上面列出的约束为桌腿 b、c 和 d 重复这些步骤。
注意:在三个顶点上显示了未锁定的挂锁图标,表示它们仅部分受限制,可以沿楼板移动。
- 单击
对桌子顶部应用 200 磅的力,检查其是否可以支撑 200 磅的人。
注意:若要执行结构屈曲分析,需要对单元施加压缩载荷。- 通过选择立方体的“顶部”或者通过使用鼠标旋转模型以查看桌子的顶部。
- 单击
 (“仿真”工作空间 >“设置”选项卡 >“载荷”面板 >“结构载荷”)以打开“结构载荷”对话框。
(“仿真”工作空间 >“设置”选项卡 >“载荷”面板 >“结构载荷”)以打开“结构载荷”对话框。 - 使用下拉菜单确保将“类型”设置为
 “力”。
“力”。 - 选择桌子上的两个脚印。
- 确认矢量箭头是否表明力压在桌子上。
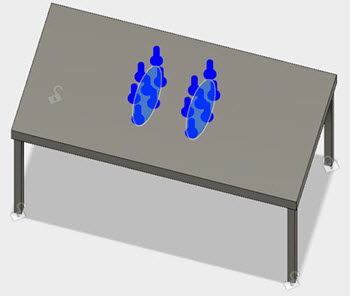
- 在“结构载荷”对话框中,为“大小”输入 200。
- 单击“确定”以接受更改并关闭对话框。
提示:为轻松找到引起屈曲所需的力,请为大小使用值 1。“屈曲载荷系数”则为“临界屈曲力”。定义构成模型的实体之间的接触。
注意:桌腿与桌面重合,因此您可以使用自动接触生成器来创建粘合接触。- 单击
 (“仿真”工作空间 >“设置”选项卡 >“接触”面板 >“自动接触”)以打开“自动接触”对话框。
(“仿真”工作空间 >“设置”选项卡 >“接触”面板 >“自动接触”)以打开“自动接触”对话框。
零件全部重合,因此默认公差 0.004 英寸是可接受的。 - 在“自动接触”对话框中,单击“生成”以生成接触。
- 单击
活动 2 概要
在本活动中,您假定楼板是刚硬且平滑的。为了完成适当的分析设置,您完成了以下任务:
- 为四条支腿的底部分别应用了不同的约束
- 在桌子的顶部应用了载荷
- 使用了自动接触生成器来创建粘合接触。