使用删除刚体模态的指导原则
当以下任一条件为真时,可以使用“删除刚体模态”:
模型完全不受约束
即,您尚未对模型的任何部分应用任何 X、Y 或 Z 约束。如果模型完全不受约束,则施加的载荷可以平衡或不平衡。
模型受约束,
- 且作用于约束方向上的所有载荷均已平衡
- 且力矩总和等于零。
- 载荷不平衡,则激活“删除刚体模态”时,为平衡载荷和力矩而添加的载荷基本上会改变反作用力,且结果将错误。
- 在您激活“删除刚体模态”后,载荷和力矩将会平衡,不会应用任何其他载荷且反作用力和结果正确。
表 1:何时激活“删除刚体模态”。
| 模型是否受约束? | 力在受约束的方向上是否平衡? | 力矩总和是否为 0? | 是否可以使用“删除刚体模态”? |
|---|---|---|---|
| 否 | -- | -- | 是 |
| 是 | 是 | 是 | 是 |
| 是 | 是 | 否 | 否 |
| 是 | 否 | 否 | 否 |
受约束的模型
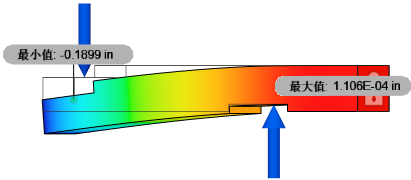
示例 1:载荷平衡,但力矩总和不等于零
假设模型受到约束,不能在垂直方向上移动。在该方向上施加了 100 N 的力。模型必须在相反方向上具有 100 N 相反的力,以便垂直方向上的力之和为零。在不受约束的方向上施加的载荷可以平衡,也可以不平衡。
 |
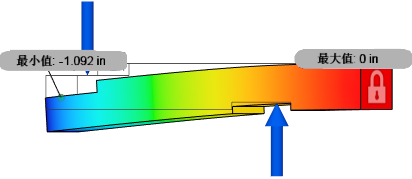 |
| 未启用“删除刚体模态”,显示正确的变形 | 已启用“删除刚体模态”,显示错误的变形 |
由于力产生的力矩不等于 0,因此当启用“删除刚体模态”时,结果错误。请注意,由于求解器添加了用于抵消不平衡力矩的相对加速度,因此反作用力矩为零。
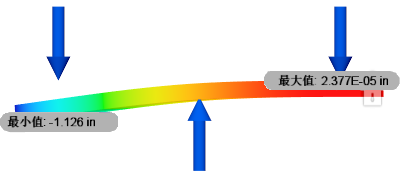
示例 2:载荷平衡且力矩总和等于零
假设模型在垂直方向上的移动受约束,且在相反方向上施加了 100 N 的力。(一个 100 N 的指向上方的力,两个 50 N 的分别指向下方的力。) 由于此示例中的间距相等,因此三个载荷产生的力矩等于零。如有必要,可在此示例中使用“删除刚体模态”选项。
 |
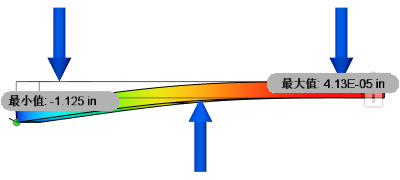 |
| 未启用“删除刚体模态”,显示正确的变形。 | 已启用“删除刚体模态”,显示正确的变形 |
不受约束的模型
对不受约束的模型使用“删除刚体模态”时,需要平衡应用的载荷才能获得精确的结果,请务必考虑是否必须这么操作。示例 3 和 4 演示了两种情况。一种情况是使用不平衡载荷生成好的结果。对于另一种情况,您需要平衡载荷以实现准确的结果。
示例 3:不受约束 - 不平衡的应用载荷可接受
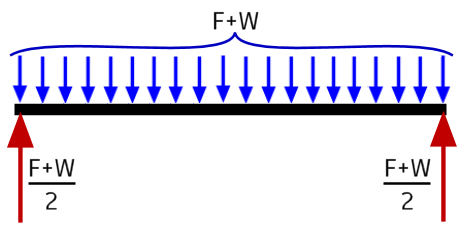
此示例是对钢的整个长度施加了均匀分布力 (F) 的简支方钢。在每端的反作用是 (F + W) / 2,其中 W 是钢本身的重量。您可以对钢的末端(红色箭头)仅应用反作用力。求解器应用的加速度可产生等于 F + W(蓝色箭头)的力 (Fa)。此加速度力的一部分作用在模型中的每个单元上。针对应用的载荷生成的反作用力沿模型的整个长度均匀分布。
或者,如果您执行以下两种操作:
- 对钢的长度应用分布力 (F)
- 激活重力载荷,从而生成重量载荷 (W)
结果与完全未受约束的情况相同。求解器仅仅需要应用非常小的加速度来抵消 FEA 产生的微小的数学不平衡。
示例 4:不受约束 - 必须应用平衡载荷才能获得正确的结果
在此示例中,您将对模型应用平衡载荷,这从理论上提供了一种平衡状态。求解器将应用非常小的全局加速度,足以抵消 FEA 方法产生的微小数学不平衡。
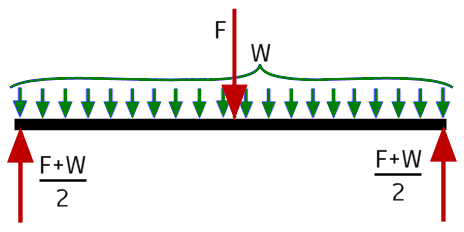
应用较大的力(F,中间红色箭头),集中在跨距的中心。激活重力以生成重量载荷(W,绿色箭头)。最后,对钢的末端应用计算的反作用力(外部的两个红色箭头)。当载荷作用于零件的点、边或小区域时,求解器通过应用全局加速度无法准确地表示它。来自全局加速度的分布力以及跨中的集中力不会生成相同的应力或位移结果。
相关:在示例 3 或 4 中,未对模型应用约束。从表 1 中的第一行,我们看到“删除刚体模态”选项已启用。但是,示例 3 和 4 之间的差异证明您还必须考虑不平衡载荷对结果准确性的可能影响。