Linee guida per l'utilizzo di Rimuovi modalità corpo rigido
È possibile utilizzare Rimuovi modalità corpo rigido quando una delle seguenti condizioni è vera:
Il modello è completamente non vincolato
Ovvero, non sono stati applicati vincoli X, Y o Z a nessuna porzione del modello. Se il modello è completamente non vincolato, i carichi applicati possono essere bilanciati o non bilanciati.
Il modello è vincolato
- E tutti i carichi che agiscono nella direzione vincolata sono bilanciati
- E la somma dei momenti è uguale a zero.
- i carichi NON sono bilanciati, quando si attiva Rimuovi modalità corpo rigido, i carichi che vengono aggiunti per bilanciare i carichi e i momenti modificano essenzialmente le forze di reazione e i risultati non sono corretti.
- i carichi e i momenti SONO bilanciati, quando si attiva Rimuovi modalità corpo rigido, non vengono applicati carichi aggiuntivi e le forze di reazione e i risultati sono corretti.
Tabella 1: Rimuovi modalità corpo rigido attivo.
| Il modello è vincolato? | Le forze sono bilanciate nelle direzioni vincolate? | La somma dei momenti è uguale a 0? | È possibile utilizzare Rimuovi modalità corpo rigido? |
|---|---|---|---|
| No | -- | -- | Sì |
| Sì | Sì | Sì | Sì |
| Sì | Sì | No | No |
| Sì | No | No | No |
Modello vincolato
Esempio 1: i carichi sono bilanciati ma la somma dei momenti NON è uguale a zero
Si supponga che un modello sia vincolato al movimento nella direzione verticale. Una forza di 100 N viene applicata in tale direzione. È necessario aggiungere una forza di 100 N nella direzione opposta in modo che la somma delle forze nella direzione verticale sia zero. I carichi che agiscono in direzioni non vincolate possono essere bilanciati o non bilanciati.
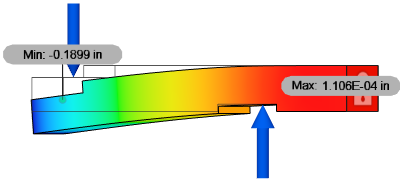 |
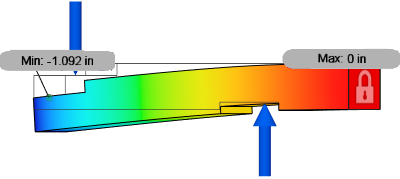 |
| Rimuovi modalità corpo rigido non è attivata, mostrando deflessione corretta | Rimuovi modalità corpo rigido è attivata, mostrando deflessione errata |
Poiché i momenti dovuti alle forze X non sono uguali a 0, i risultati non sono corretti quando l'opzione Rimuovi modalità corpo rigido è attivata. Notare che il momento di reazione è pari a zero, poiché il risolutore aggiunge un'accelerazione opzionale per controbilanciare il momento non bilanciato.
Esempio 2: i carichi sono bilanciati E la somma dei momenti è uguale a zero
Si supponga che un modello sia vincolato al movimento nella direzione verticale, con una forza di 100 N applicata in direzioni opposte. (Una forza di 100 N rivolta verso l'alto e due forze di 50 N ciascuna rivolta verso il basso). A causa della spaziatura identica in questo esempio, il momento dovuto ai tre carichi è uguale a zero. Se necessario, è possibile utilizzare l'opzione Rimuovi modalità corpo rigido in questo esempio.
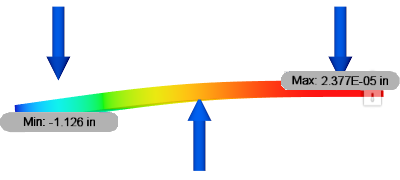 |
 |
| Rimuovi modalità corpo rigido non attivata, mostrando deflessione corretta. | Rimuovi modalità corpo rigido è attivata, mostrando deflessione corretta |
Modello non vincolato
Quando si utilizza Rimuovi modalità corpo rigido con un modello non vincolato, è comunque importante valutare la necessità di bilanciare i carichi applicati per ottenere risultati accurati. Gli esempi 3 e 4 dimostrano due situazioni. Uno scenario produce risultati validi con un carico non bilanciato. Per l'altro scenario, è necessario bilanciare i carichi per ottenere risultati accurati.
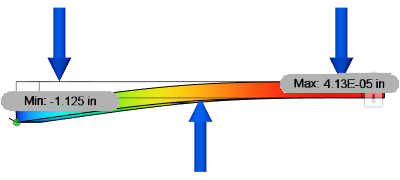
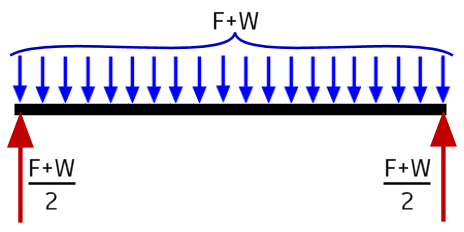
Esempio 3: Non vincolato - I carichi applicati non bilanciati sono accettabili
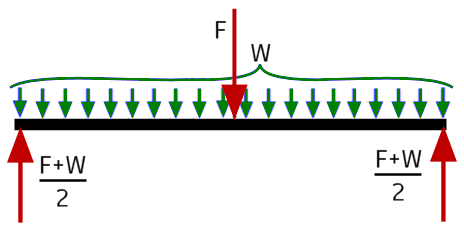
Questo esempio è una barra quadrata liberamente vincolata con una forza distribuita uniformemente (F) applicata all'intera lunghezza della barra. La reazione ad ogni estremità è (F + W) / 2, dove W è il peso della barra. Le forze di reazione possono essere applicate solo alle estremità della barra (frecce rosse). L'accelerazione applicata dal risolutore produce una forza (Fa) uguale a F + W (frecce blu). Una parte di questa forza di accelerazione agisce su ogni elemento del modello. La controparte risultante al carico applicato viene distribuita uniformemente lungo l'intera lunghezza del modello.
In alternativa, se si eseguono le due seguenti azioni:
- Applicare la forza distribuita (F) alla lunghezza della barra
- Attivare il carico di gravità producendo il carico peso (W)
Il risultato è quindi identico a quello completamente non vincolato. Il risolutore deve applicare solo una piccola accelerazione per contrastare i piccoli squilibri matematici che risultano dal metodo FEA.
Esempio 4: Non vincolato - I carichi bilanciati devono essere applicati per ottenere risultati corretti
In questo esempio, vengono applicati carichi bilanciati al modello, che forniscono in teoria una condizione di equilibrio. Il risolutore applica una quantità molto ridotta di accelerazione globale, sufficiente a contrastare il lieve squilibrio matematico introdotto dal metodo FEA.
Applicare una forza grande (F, la freccia rossa centrale), concentrata al centro dell'estensione. Attivare la gravità per produrre il carico peso (W, le frecce verdi). Infine, applicare le forze di reazione calcolate alle estremità della barra (le due frecce rosse esterne). Quando un carico agisce in corrispondenza di un punto, uno spigolo o un'area di piccole dimensioni di una parte, il risolutore non è in grado di rappresentarlo accuratamente applicando l'accelerazione globale. La forza distribuita dall'accelerazione globale e una forza concentrata in corrispondenza di un punto medio non producono gli stessi risultati di sollecitazione o spostamento.