시뮬레이션 작업공간의 원격 구속조건
원격 구속조건은 모형에서 멀리 떨어진 공간의 점에서 모형의 이동을 제한합니다. 모형의 대상 면, 고정할 자유도 및 이동을 제한하는 앵커 위치 또는 공간의 점을 정의합니다.
원격 구속조건은 보다 복잡한 조립품을 모델링하거나 단순화하려는 경우 유용합니다. 예를 들어, 전체 디자인을 모델링하지 않고 원격 볼 접합을 나타내는 데 원격 구속조건을 사용할 수 있습니다.
원격 구속조건은 이벤트 시뮬레이션을 제외한 모든 기계 시뮬레이션 학습에서 제공됩니다.
다른 자유도 수정 효과
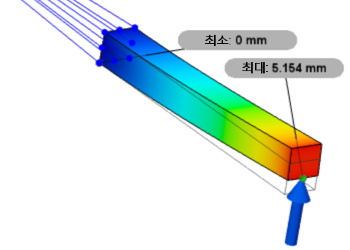 |
(a) 빔의 한쪽 끝에 원격 구속조건을 적용하고 6개의 자유도(Ux, Uy, Uz, Rx, Ry, Rz)를 모두 고정하는 경우 다른 쪽 끝에 하중을 적용하면 고정 구속조건처럼 동작합니다. 원격 구속조건은 강체 연결이 있는 면에 노드(강체라고 함)를 고정합니다. 노드가 재배치되거나 전혀 회전하지 않는 경우 완전한 강체 연결이 적용됩니다. |
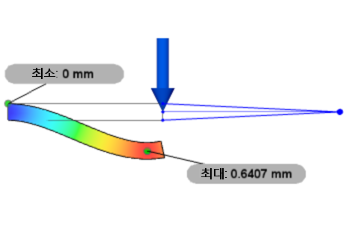 |
(b) 이 예에서는 빔의 한쪽 끝에 고정된 프로젝트 구속조건이 적용됩니다. 다른 끝에 원격 구속조건을 적용하고 변환 자유도(Ux, Uy 및 Uz)만 고정하는 경우 빔의 끝면에 하중을 적용하면 빔의 끝이 재배치 및 회전할 수 있습니다. 면이 항상 원격 구속조건의 위치를 가리키도록 회전합니다. |
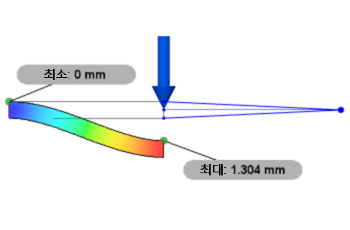 |
(c) 대신 회전 자유도(Rx, Ry, Rz)만 고정하고 하중을 빔의 끝면에 적용하면 변환 자유도만 고정된 경우보다 팁 위치가 더 많이 변동됩니다. 이 경우 면은 항상 수직으로 유지됩니다. |
그림 1: (a) 6개의 모든 자유도가 고정된 원격 구속조건, (b) 변환 자유도가 고정된 원격 구속조건, (c) 회전 자유도가 고정된 원격 구속조건을 사용하는 변위 결과.
원격 구속조건의 기본 설정은 완전히 구속되어 있으며, 고정된 프로젝트 구속조건을 적용하는 것과 유사합니다.