Diretrizes para usar os modos Remover corpo rígido
Remover modos de corpo rígido pode ser usado quando uma das seguintes condições for verdadeira:
O modelo está totalmente sem restrições
Isto é, você não aplicou nenhuma restrição X, Y ou Z a qualquer parte do modelo. Quando o modelo estiver totalmente sem restrições, as cargas aplicadas podem ser equilibradas ou desequilibradas.
O modelo é restringido,
- E todas as cargas que atuam na direção restringida são equilibradas
- E a soma dos momentos é igual a zero.
Nota: Remover modos de corpo rígido adiciona cargas ao modelo para fazer com que as cargas e os momentos aplicados sejam equilibrados, sem considerar as restrições. Quando o modelo está restringido, e
- as cargas NÃO são balanceadas, quando você ativa Remover modos de corpo rígido, as cargas que são adicionadas para equilibrar as cargas e momentos essencialmente alteram as forças de reação, e os resultados estão errados.
- as cargas e os momentos SÃO equilibrados, quando você ativa Remover modos de corpo rígido, nenhuma carga adicional é aplicada e as forças de reação e os resultados estão corretos.
Tabela 1: Quando ativar Remover modos de corpo rígido.
| O modelo está restringido? | As forças são equilibradas nas direções restringidas? | A soma dos momentos = 0? | É possível usar os modos Remover corpo rígido? |
|---|---|---|---|
| Não | -- | -- | Sim |
| Sim | Sim | Sim | Sim |
| Sim | Sim | Não | Não |
| Sim | Não | Não | Não |
Nota: As cargas aplicadas em direções não restringidas podem ser equilibradas ou não equilibradas.
Modelo restringido
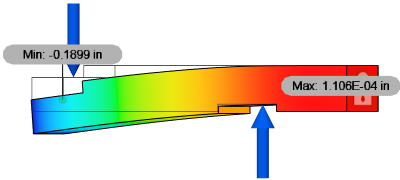
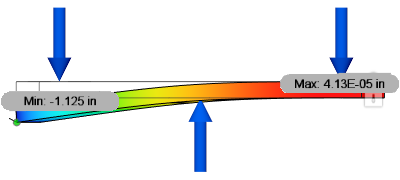
Exemplo 1: as cargas são equilibradas, mas a soma dos momentos NÃO é igual a zero
Suponha que um modelo esteja restringido contra o movimento na direção vertical. Uma força de 100 N é aplicada nessa direção. O modelo deve ter uma força oposta de 100 N na direção oposta para que a soma das forças na direção vertical seja zero. As cargas que atuam em direções não restringidas podem estar equilibradas ou não equilibradas.
 |
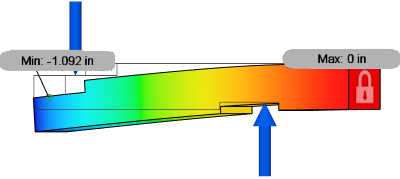 |
| Remover modo de corpo rígido não ativado, mostrando a deflexão correta | Remover modo de corpo rígido ativado, mostrando deflexão incorreta |
Como os momentos devido às forças não são iguais a 0, os resultados estão errados quando o modo Remover corpo rígido está ativado. Observe que o momento de reação é zero, devido ao solucionador adicionar uma aceleração rotacional para contra o momento desequilibrado.
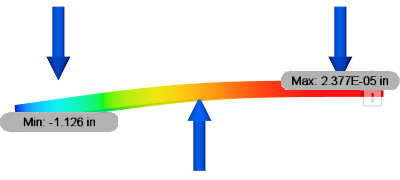
Exemplo 2: as cargas são equilibradas E a soma dos momentos é igual a zero
Suponha que um modelo esteja restringido contra o movimento na direção vertical, com uma força de 100 N aplicada em direções opostas. (Uma força de 100 N apontando para cima e duas forças de 50 N cada apontando para baixo). Devido ao espaçamento igual neste exemplo, o momento devido às três cargas é igual a zero. A opção remover modos de corpo rígido pode ser usada neste exemplo, se necessário.
 |
 |
| Remover modo de corpo rígido não ativado, mostrando a deflexão correta. | Modo Remover corpo rígido ativado, mostrando a deflexão correta |
Modelo sem restrições
Ao usar o modo Remover corpo rígido com um modelo não restringido, ainda é importante considerar se você deve equilibrar as cargas aplicadas para obter resultados precisos. Os exemplos 3 e 4 demonstram duas situações. Um cenário produz bons resultados com uma carga desequilibrada. Para o outro cenário, é preciso equilibrar as cargas para obter resultados precisos.
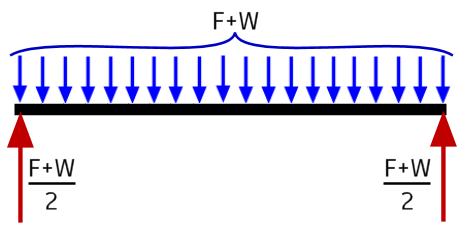
Exemplo 3: Não restringido - cargas aplicadas não balanceadas são aceitáveis
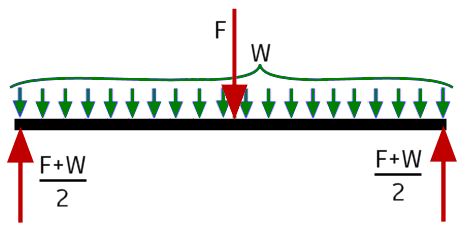
Este exemplo é uma barra quadrada simplesmente suportada com uma força distribuída uniformemente (F) aplicada ao comprimento total da barra. A reação em cada extremidade é (F + W) / 2, onde W é o peso da barra em si. É possível aplicar somente as forças de reação às extremidades da barra (setas vermelhas). A aceleração aplicada pelo solucionador produz uma força (Fa) igual a F + W (setas azuis). Uma parte dessa força de aceleração atua em cada elemento no modelo. A força equivalente resultante para a carga aplicada é distribuída de forma uniforme ao longo de todo o comprimento do modelo.
Como alternativa, se você executar as duas ações a seguir:
- Aplicar a força distribuída (F) ao comprimento da barra
- Ativar a carga de gravidade, produzindo a carga de peso (W)
Em seguida, o resultado é idêntico ao caso totalmente sem restrições. O solucionador só precisa aplicar uma aceleração muito pequena para combater os pequenos desequilíbrios matemáticos resultantes do método FEA.
Exemplo 4: Não restringido - Cargas equilibradas devem ser aplicadas para resultados corretos
Neste exemplo, você aplica cargas equilibradas ao modelo, que teoricamente fornece uma condição de equilíbrio. O solucionador aplica uma quantidade muito pequena de aceleração global, o suficiente para combater o leve desequilíbrio matemático introduzido pelo método FEA.
Aplique uma força grande (F, a seta vermelha do meio), concentrada no centro do vão. Ative a gravidade para produzir a carga de peso (W, as setas verdes). Por fim, aplique as forças de reação calculadas às extremidades da barra (as duas setas vermelhas externas). Quando uma carga atua em um ponto, uma aresta ou uma pequena área de uma peça, o solucionador não pode representá-la com precisão ao aplicar a aceleração global. A força distribuída da aceleração global e uma força concentrada no meio do vão não produzem os mesmos resultados de tensão ou deslocamento.