組合約束和組合接頭都會建立關係來確定元件放置和允許的移動。
「約束」和「組合」指令是兩種老辦法,可以定位元件並使用約束來逐漸消除自由度 (DOF)。
「接頭」指令可以降低元件關係的複雜性。使用「接頭」可以定位元件並完整定義運動。可以將「鎖住」和「保護」控制與「接頭」配合使用。當您在瀏覽器中選取接頭時,可以在關聯式功能表中找到這兩個選項。「鎖住」會消除所有自由度,但允許元件在相關元件移動時變更位置。「固定」也會消除所有自由度,但會將元件位置固定在空間中。需要注意的是,如果加入的關係與所需的運動發生衝突,則應對接頭使用「保護」。
可以為約束和連接關係指定所允許的運動範圍。
開始定位元件
- 在舊版本的 Inventor 中,您在組合中放置的第一個零件是不動的。零件的位置是固定的,並且其原點與組合原點重合。最好至少固定一個不動的元件,以便為其他元件提供錨定。若要固定所需的元件,請在放置元件時,從關聯式功能表中選取「放置在原點處不動」。
- 在組合中放置元件時,請使用關聯式功能表中的選項,圍繞 X、Y 或 Z 軸線旋轉,以確定初始方位。
組合接頭
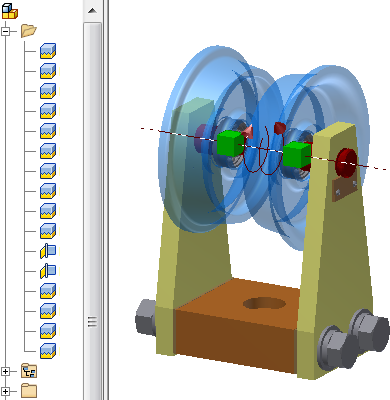
在以下影像中,使用了「剛性」和「旋轉」兩種組合接頭類型來定位元件和定義自由度。由於「接頭」可以明確定義元件的位置和自由度,因此僅需少數接頭即可提供一致、可預測的結果。請注意,「剛性」是最常用的接頭類型,並且只有兩個軸承會旋轉。換言之,所有元件的組合運動都已正確定義。您可以使用含約束的接頭來取得所需的結果。
組合約束
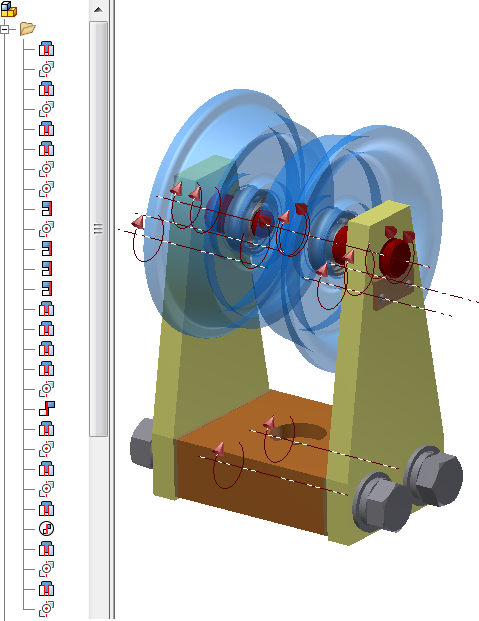
在以下影像中,使用了「貼合」、「齊平」和「插入」約束來定位元件和定義運動範圍。相對於連接而言,約束通常需要使用更多關係來定義自由度和定位元件。請注意,以下影像中的結件仍然具有旋轉自由度。如果方位不重要,則在使用約束時,經常會允許額外的自由度。您可以將約束與接頭配合使用來取得所需的結果。
建立組合關係
「接頭」指令
「接頭」可以根據原點選取自動確定接頭類型。您也可以選取接頭類型,然後選取要定位和接合的物件。除了建立關係,還可以變更瀏覽器名稱和套用限制。
「接頭」會相對於選取的第二個元件來移動選取的第一個元件。如有必要,該指令會放鬆既有關係或不動狀態,以允許第一個元件移動。為協助您正確定位元件,套用之前會先預覽接頭的效果。
「約束」指令
選取約束類型以更新「放置約束」對話方塊,然後選取要約束的物件。除了建立約束,您還可以變更瀏覽器名稱以及套用限制。
套用約束前,您可以先預覽其效果,這有助於您正確地定位元件。選取約束類型、二個元件,並設定角度或偏移量之後,元件就會移到所約束的位置。您可以依需要調整設定,然後套用這些設定。
「組合」指令
選取要約束的物件,然後選取要套用的約束類型。會在圖形視窗中顯示小工具列,而不是顯示對話方塊。「組合」會根據您選取的幾何圖形,自動選取有效的約束類型。例如,如果您選取平物面,則僅會在清單中顯示「貼合 - 貼合」、「貼合 - 齊平」和「角度 - 正向」約束類型。如果第一次選取了環形邊,則僅會列示「插入 - 反向」和「插入 - 對齊」約束,且您第二次只能選取環形邊。
「組合」指令永遠會相對於選取的第二個元件來移動選取的第一個元件。如有必要,會放鬆既有約束或固定狀態,以允許第一個元件移動。結束「組合」指令後,會計算所有新約束和既有約束。如果有衝突,會顯示「組合約束管理」對話方塊,以便您可以抑制或刪除約束。如果不確定某元件的約束方式,請使用此工作流程來變更該元件的位置。您可以重新定位元件,然後解決所有約束衝突。
某些約束類型 (「運動」、「轉換」、「角度 - 無向」和「角度 - 明確參考向量」) 在「組合」指令中不受支援。此外,您無法變更約束名稱或套用限制。您可以在建立約束後對其進行編輯,以變更這些設定。
位置限制
限制是一些指定的值,用於為可移動或旋轉的元件定義所允許的運動範圍。約束與接頭都支援限制。在瀏覽器中,使用 +/- 符號來指出具有限制的關係。
模擬活動零件的運動
如果您要使用活動零件設計一個機構,則模擬運動是成型過程中的重要環節。決定適當的方法之前,請考量以下事項:
- 對約束或接頭使用限制,可定義所允許的移動或旋轉範圍。
- 運動約束使用定義的旋轉比率或旋轉-轉換比率,來描述元件之間的移動。可使用運動約束做為確認移動 (例如適當的齒輪比) 的輕量級方法。
- 接觸集使用元件之間的實體接觸來限制移動。如果偵測到干涉,元件不會移動。此方法比運動約束需要更多計算。
- 動力學模擬使用物理性質 (例如質量、摩擦、慣性矩陣和負載定義),來提供有關元件在實體世界中行為方式的資訊。可使用 Inventor Simulation Suite 來瞭解實際力在您的設計上產生的影響和結果。此方法需要最多的計算,但也可提供最準確的結果。至 Inventor Studio 的連結可讓您錄製運動的擬真動畫。
- Inventor Studio 支援動畫展示組合關係和位置表現法,以建立機械運動。Inventor Studio 的主要用途是進行擬真內容或說明性內容的影像和視訊輸出。
配置約束
執行製作元件時,會建立配置約束。配置約束可定義配置與從配置推入導出的的零件之間的關係。配置約束由配置的三個主要平面與導出零件之間的齊平約束,以及配置的 Z 軸線與導出零件之間的零度角度約束組成。
- 「約束至配置平面」- 以固定偏移將元件約束至配置平面並允許元件平行於配置平面移動。如果未選取此選項,則元件可以互垂於配置平面 (沿配置零件的 Z 軸線) 移動。
- 「配置控制位置」- 您的配置零件可控制組合元件的 X 和 Y 的位置。
- 「組合控制位置」- 您可以移動與元件約束和自由度有關的元件。您可以將此運動約束為 2D 或 3D。
配置約束提供的行為在骨架塑型中非常有用:
根據草圖的約束關係和製作元件期間選取的選項來初始化配置約束的預設行為。若要變更元件的行為,請在瀏覽器中的元件例證上按一下右鍵,在關聯式功能表中選取「配置約束」,然後選擇適當的位置選項。
您可以修改配置約束,以取得目標行為。但是,除了透過製作元件工作流程之外,您無法放置新配置約束。
在取代元件上保留約束
有兩種方式可保留置換元件的約束︰
- 從通用基準建立既有的被置換元件 (使用「將複本儲存成」選項)。
- 使用 iMate。
iMate 是零件中的約束配對,它在每次放置在組合中時,定義零件如何與其他元件相配合。
透過在瀏覽器中的元件上按一下右鍵,然後選取「推論 iMate」,將既有的組合約束轉換為 iMate 定義。您在編輯或修改元件時,也可以建立 iMate。
在複雜組合中建立關係的策略
若要簡化複雜組合成員的定位,請建立數個小型組合並依需要套用關係,然後將每個小型組合儲存為一個獨立的檔案。使用此方法,可將次組合做為一個整體放置在上游組合中。
在次組合中群組零件也可以簡化在多個組合中使用零件的程序。