ピストンをベースおよび 2D スケッチ パーツに拘束します。演習の次の部分では、Cylinder_Main.iam と Cylinder Body Sub_Assy.iam が両方とも開いていることを前提にしています。
- リボンで、
[表示]タブ
 [ウィンドウ]パネル
[タイル]
の順にクリックします。
[ウィンドウ]パネル
[タイル]
の順にクリックします。 - Cylinder Body Sub_Assy を含んだウィンドウの内側をクリックします。
-
 ブラウザから[アセンブリ]アイコンをクリックして、[Cylinder_Main]ウィンドウまでドラッグします。[コンポーネント配置]コマンドを使用しなくても、メイン アセンブリにサブアセンブリが挿入されます。
ブラウザから[アセンブリ]アイコンをクリックして、[Cylinder_Main]ウィンドウまでドラッグします。[コンポーネント配置]コマンドを使用しなくても、メイン アセンブリにサブアセンブリが挿入されます。 - サブアセンブリ ファイルを保存して閉じます。
- メイン アセンブリを含んだウィンドウを最大化します。
- [拘束]コマンドを起動します。
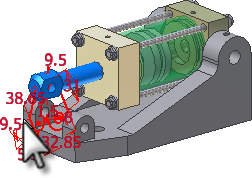
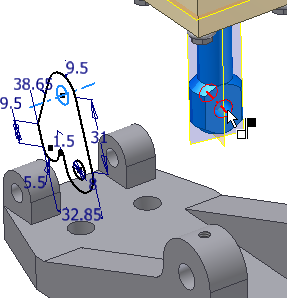
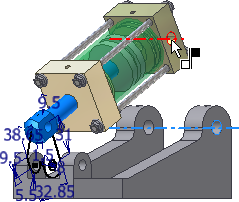
- 2D スケッチとピストン ロッドの穴との間に、メイト軸/軸拘束を適用します(次の図を参照)。
別個のウィンドウでサブアセンブリを開くと、ピストンが自由に動きます。サブアセンブリを上位レベル アセンブリに挿入すると、自由な動きが無効になります。メイン アセンブリ内のサブアセンブリの拘束を終了するには、自由度を有効にして、上位レベル アセンブリ内を移動できるようにする必要があります。ピストンが自由に回転できない場合、サブアセンブリを正確な位置に回転できません。
- ブラウザで、[Cylinder Body Sub_Assy]を探します。
- サブアセンブリを右クリックし、メニューの[フレキシブル]を選択します。これにより、サブアセンブリに存在していた動きの自由度が上位レベル アセンブリでアクティブ化されます。
ブラウザ内のサブアセンブリ アイコンが変わり、フレキシブル ステータスが有効であることを示します。
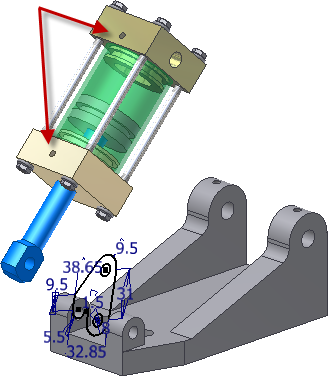
リボンで、 [アセンブリ]タブ [位置]パネル
[回転]
の順にクリックして、次の図に示すように、円柱の端点キャップのねじ穴が上を向くまで、サブアセンブリを移動します。右クリックして[完了]を選択します。
[位置]パネル
[回転]
の順にクリックして、次の図に示すように、円柱の端点キャップのねじ穴が上を向くまで、サブアセンブリを移動します。右クリックして[完了]を選択します。このコマンドは、ビューの回転とは異なり、スペース内のコンポーネントを物理的に回転させます。拘束を適用する前に、時間をかけてコンポーネントどうしの位置合わせを行うことで、適用した拘束が予想どおりに動作するようになります。
- [拘束]コマンドを起動します。既定の設定をそのまま使用します。
- ブラウザで、[Cylinder Base]および[Cylinder Body Sub_Assy]を展開して、ブラウザ ツリーを表示します。[Cylinder Body Sub_Assy]内の[原点]フォルダを展開します。
- [Cylinder Base]の下の[作業平面1]を選択し、[Cylinder Body Sub_Assy]の下の[Origin]フォルダにある[YZ Plane]を選択して、[メイト 面/面]拘束を適用します。
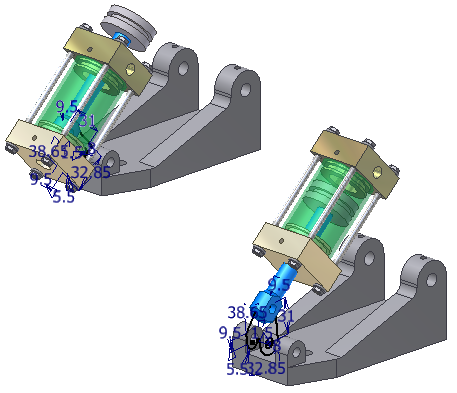
サブアセンブリが内側から外側に反転した場合、ベースの後部にサブアセンブリをドラッグし、方向を修正します(次の図を参照)。適用した拘束によって、動きが制限されます。
- [拘束]コマンドを起動します。既定のオプションをそのまま使用します。
- 次の図に示すように、各穴の中心を選択し、[メイト軸/軸]拘束を配置します。
- 2D スケッチ パーツをドラッグし、デジタル プロトタイプのモーションをチェックします。