ここでは、かさ歯車間の関係を作成する必要があります。
2 つのかさ歯車があり、大きい方はカムの動作に関連付けられ、小さい方はモータ アセンブリに関連付けられます。まず、小さい方の歯車から作業します。
- [可動グループ]フォルダと[モータ]ノードを展開し、[かさ歯車 1]ノードを表示します。
- [かさ歯車]ノードを右クリックして、[編集]をクリックします。
自動的にパーツ編集環境になります。
- ブラウザで、サーフェス ボディ(1)フォルダを展開します。
- [Srf1]ブラウザ ノードを右クリックして、[表示設定]をクリックします。
このサーフェスを使用することで、かさ歯車の関係を定義できます。
- リボンで[戻る]
 をクリックして、シミュレーション環境に戻ります。または、グラフィックス領域を右クリックし、[編集終了]をクリックします。
をクリックして、シミュレーション環境に戻ります。または、グラフィックス領域を右クリックし、[編集終了]をクリックします。 - リボンで、
[ダイナミック シミュレーション]タブ
 [ジョイント]パネル
[ジョイントを挿入]
[ジョイント]パネル
[ジョイントを挿入]
 の順にクリックし、[ジョイントを挿入]ダイアログ ボックスを表示します。
の順にクリックし、[ジョイントを挿入]ダイアログ ボックスを表示します。 - ドロップダウン リストから[回転: 外接円錐]
 を選択します。
を選択します。 - コンポーネント セレクタ
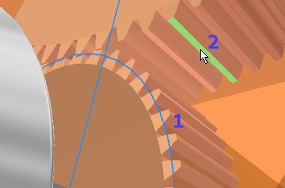
 が自動的にアクティブになり、選択を開始できます。サーフェス円錐の基準面で、ピッチ円直径の円を選択します。
が自動的にアクティブになり、選択を開始できます。サーフェス円錐の基準面で、ピッチ円直径の円を選択します。 - コンポーネント 2 セレクタ
 をクリックし、かさ歯車 2 の円錐面を選択します。
をクリックし、かさ歯車 2 の円錐面を選択します。 2 番目の歯車を表示するには、[可動グループ]と[カム クランク]ブラウザ ノードの展開が必要になる場合があります。
- [OK]をクリックします。
- モータのかさ歯車をクリックしてドラッグします。[カム クランク]アセンブリが、作成したジョイントによって動作します。
- パーツを再度編集し、Srf1 サーフェス ボディの[表示設定]をオフにします。