遠心力荷重では、ユーザが指定した軸を中心に回転するモデル全体の影響をシミュレーションします。材料の質量密度がゼロでないパーツのみが影響を受けます。モデルは、実際には回転しません。角回転または角加速度(あるいは両方)により発生する力に等しい力が計算され、各要素の節点に適用されます。
線形解析
線形材料による静解析、固有値解析(初期応力考慮)、および線形座屈解析の 3 種類の線形解析で遠心力荷重がサポートされています。モデルは、一定の速度で回転したり、一定の角加速度で回転したり、その両方で回転することができます。
コマンドの実装は線形解析間で若干異なります。3 つの解析すべてにおいて、実際の荷重を[解析パラメータ]ダイアログ ボックスの[遠心]タブで定義します。また、回転軸および角加速度の軸は 3D 空間内の任意の点を通過できます(つまり、軸は全体座標系の原点を通過する必要はありません)。違いは次のとおりです。
- 線形材料による静解析:
- 遠心力荷重には次の 3 つの方法でアクセスできます。
- ブラウザ(ツリー表示)で[解析タイプ]見出しの下にある[遠心]見出しを右クリックし、[編集]コマンドを選択します。
- リボン コマンドの[セットアップ]
 [荷重] [遠心]を選択します。
[荷重] [遠心]を選択します。 - ブラウザまたはリボンで[解析パラメータ]ダイアログ ボックスを開き、[遠心]タブをクリックします。
- [遠心]タブで定義した角速度(オメガ)または角加速度(アルファ)、あるいはその両方が各荷重ケースで有効になるかどうかは、荷重ケース全体の乗数によって個別に決定します。
- 角速度の軸と角加速度の軸は個別に定義できます(同じ値または異なる値を指定できます)。
- 角速度の軸と角加速度の軸は、3D 空間内の任意の線に沿って方向のベクトルで指定できます。
- 遠心力荷重には次の 3 つの方法でアクセスできます。
- 固有値解析(初期応力考慮)および線形座屈解析:
- 遠心力荷重には次の 2 つの方法でアクセスできます。
- リボン コマンドの[セットアップ] [荷重] [遠心]を選択します。
- ブラウザまたはリボンで[解析パラメータ]ダイアログ ボックスを開き、[遠心]タブをクリックします。
- リボン コマンドの[セットアップ]
- 遠心力荷重の荷重ケース全体の乗数はありません。[解析パラメータ]ダイアログ ボックスの[遠心]の[指定された遠心荷重を含む]チェック ボックスでのみ有効化します。有効化した場合、遠心力荷重はモード形状、モード周波数、および座屈のすべての乗数に影響を及ぼします。
- 回転軸と角加速度の軸は同じにする必要があります(個別に指定できません)。
- 回転軸と角加速度の軸は全体座標系のいずれかの軸(X、Y、または Z)のいずれかにする必要があります。
- 遠心力荷重には次の 2 つの方法でアクセスできます。
非線形解析
MES と 非線形材料による静解析の 2 種類の非線形解析で遠心力荷重がサポートされています。回転速度と角加速度は荷重曲線に基づいて経時的に変化します。回転速度と角加速度の両方に同じ荷重曲線を使用するか、2 つの異なる荷重曲線を指定することができます。遠心力荷重は、[高度解析パラメータ]ダイアログ ボックスの[遠心]タブで定義します。これには次の 2 つの方法でアクセスできます。
- リボン コマンドの[セットアップ] [荷重] [遠心]を選択します。
- ブラウザまたはリボンで[解析パラメータ]ダイアログ ボックスを開き、[高度]ボタンをクリックして[遠心]タブをクリックします。
遠心力荷重をサポートするいずれの非線形解析にも次の特性があります。
- 回転軸と角加速度の軸は個別に定義できます(同じ値または異なる値を指定できます)。
- 回転軸と角加速度の軸は 3D 空間内の任意の点を通過できます(つまり、軸は全体座標系の原点を通過する必要はありません)。
- 回転軸と角加速度の軸は 3D 空間内の任意の線に沿って方向のベクトルで指定できます。
遠心力荷重を適用する
モデルに遠心力荷重を適用するには、次の手順を実行します。
- 上記のいずれかの方法で適切なダイアログ ボックスを表示します(方法は解析タイプによって異なります)。
- ダイアログ ボックスに[指定された遠心荷重を含む]チェック ボックスがある場合はオンにします。
- [角速度]および[角加速度]に適切な大きさを指定します。
- 非線形解析の場合、角速度および角加速度に使用する荷重曲線番号を選択します。
- 上記のいずれかの方法で軸の方向を指定します(方法は解析タイプによって異なります)。解析タイプによって、回転軸と角加速度の軸が異なる場合もあれば、両方に同じ軸を指定する必要が生じる場合もあります(詳細については上記を参照)。また、全体座標系以外の軸の方向がサポートされる場合もあれば、サポートされない場合もあります(詳細については上記を参照)。軸上の 1 点の座標または方向の座標を使用するか、全体座標系の軸のプルダウン リストを使用して、1 つまたは複数の軸の位置と方向を指定します。角回転は、定義したベクトルに対する右手の法則に従います。
- 線形静的応力解析の場合、[解析パラメータ]ダイアログ ボックスの[乗数]タブで、角速度または角加速度(あるいはその両方)の荷重ケース全体の乗数を定義します。 ヒント: 荷重を有効にするには、ゼロ以外の乗数を指定する必要があります。「解析の設定と実行」>「解析固有の情報」>「線形」>「解析パラメータ」>「 線形材料による静解析 」を参照してください。
たとえば、図 1 のように原点を中心とする円を考えてみます。原点の Z 軸を中心とした回転を指定するには、[軸上の 1 点]の座標を(0,0,0)、[方向]の座標を(0,0,1)と入力します。円は中心を軸として回転し、中心は固定されます。
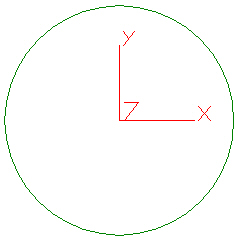
図 1: 原点を中心に回転するモデル 1
ただし、図 2 のように(3,0,0)を中心とする円に対して遠心力荷重を同様に設定した場合、荷重は原点を中心にした円の回転に基づきます。つまり、円の中心は、全体座標系の原点を中心とする円形の軌道に沿って移動します。図 3 は、図 2 の円に一定の遠心力荷重を適用した場合の、円の軌道を示しています。
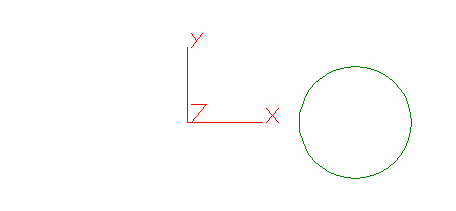
図 2: モデル 2 – 中心が全体座標系の原点ではない円
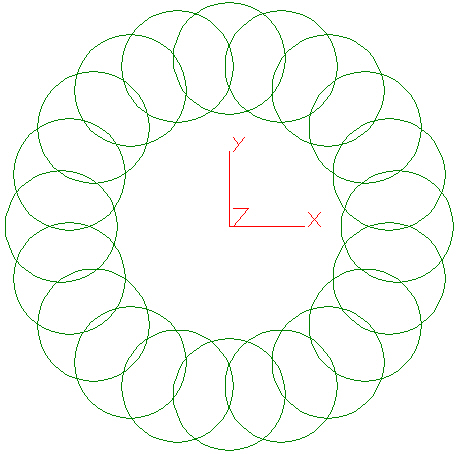
図 3: 原点を中心に回転するモデル 2 の解釈
- 支持シャフトまたはレバーとの接続領域を完全に固定します。
- または、回転パーツがシャフトまたはレバーに収まる穴の表面に沿って、接線方向の運動を拘束します。この拘束では、接線方向の 3 つの自由度のうち 2 つが処理されます。さらに、軸方向の並進に対して点、エッジ、または表面を拘束します。たとえば、法線方向の並進に対して、シャフトの肩部との接触領域を拘束します。これにより、スラスト荷重がかかった軸方向の運動は発生せず、3 番目の並進 DOF が処理されます。