만들어야 할 다음 관계는 캠 종동륜 롤러와 캠 구성요소 간의 관계입니다. 종동륜 롤러는 캠과 접촉해야 합니다.
자유도 유지
종동륜 롤러는 대칭 부품이며, 기본적으로 다이나믹 시뮬레이션에서는 대칭 구성요소의 이동을 줄이려고 합니다. 그 이유가 궁금하십니까? 예제를 보시면 이해가 쉽습니다.
휠 조립품을 생각해 봅시다. 림에 장착된 타이어가 있습니다. 해당 조립품이 러그 너트와 함께 차량에 부착됩니다. 시뮬레이션 목적의 경우 러그 너트의 기능은 해당 축 주변을 회전하지 않으며, 조립품을 차량에 구속시킵니다. 러그 너트는 대칭 구성요소이므로 회전 자유도(DOF)는 자동으로 제거됩니다. 이렇게 하면 시뮬레이션용 모형이 단순화됩니다. 러그 너트의 회전 자유도를 유지하려면 DOF 유지 명령을 사용하여 유지할 수 있습니다. 반대의 경우에도 동일합니다. 즉, DOF 무시를 사용하여 구성요소의 자유도를 제한할 수 있습니다.
종동륜 롤러가 자유도를 유지하면서 캠에 접촉하는지 확인하려면 다음을 수행합니다.
- 가동 장치 그룹 폴더에서 용접 그룹을 확장합니다. 그룹에 두 개의 구성요소가 있습니다.
- 종동륜 롤러 구성요소를 마우스 오른쪽 버튼으로 클릭하고 DOF 유지를 클릭합니다.
롤러는 동작 특징을 유지합니다. 이제 롤러가 캠에 접촉하는지 확인해야 합니다.
- 접합 삽입 명령을 클릭하여 대화상자를 표시합니다. 리스트에서 2D 접촉을 선택합니다.
- 캠 프로파일 모서리를 선택합니다.
- 롤러 구성요소에 표시된 스케치 프로파일을 선택합니다. 보이는 것처럼 시뮬레이션의 부품으로 스케치 형상을 사용할 수 있습니다.
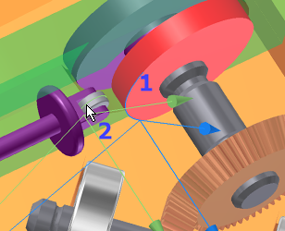
- 확인을 클릭합니다.
- 종동륜이 캠에 접촉할 때까지 끕니다. 종동부는 캠에 접촉되지만 캠을 관통하지는 않습니다. 2D 접촉은 두 구성요소 간의 기계적 관계를 구축했습니다.
계속 진행하기 전에, 2D 접촉의 특성을 수정하고 힘 벡터를 표시합니다.
- 검색기에서 2D 접촉 접합을 마우스 오른쪽 버튼으로 클릭하고 특성을 클릭합니다.
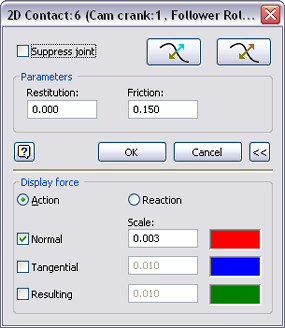
- 원상 복구 값을 0.0으로 설정하고 마찰 값을 0.15로 설정합니다.
 대화상자를 확장하여 아래쪽 섹션에 액세스합니다. 법선 상자를 선택하고 축적을 0.003으로 설정합니다.
대화상자를 확장하여 아래쪽 섹션에 액세스합니다. 법선 상자를 선택하고 축적을 0.003으로 설정합니다. - 확인을 클릭합니다.