После создания сборки и добавления одного или нескольких стандартных соединений можно вставить другие соединения (шарниры качения или скольжения, 2D контактные или силовые соединения) между двумя компонентами, которые имеют одну или несколько степеней свободы. Эти соединения следует вставить вручную; в отличие от стандартных другие типы соединений не создаются автоматически путем преобразования зависимостей . Все соединения в этих категориях связываются зависимостями с одной или несколькими степенями свободы, заданными стандартными соединениями.
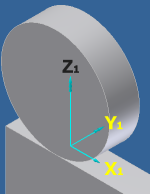 |
Шарниры качения, также как и шарниры скольжения, могут замыкать кинематические контуры и, за исключением конических соединений, действуют между компонентами, для которых задано 2D движение относительно друг друга. Программа размещает системы координат соединения в точке контакта. Движение соединения выполняется в плоскости, определенной векторами Z 1 (нормаль) и X 1 (касательная). Плоскость контакта определяется векторами X 1 и Y 1 . |
Шарниры качения можно создать только между компонентами, для которых задано движение относительно друг друга. Поэтому в механизме, содержащем два компонента шарнира качения, должно присутствовать хотя бы одно стандартное соединение. Шарниры качения задают зависимость постоянного контакта. В зависимости от того, какой параметр выбран при создании соединения, поведение шарниров может быть двух типов.
- Качение предполагает одновременное вращение колес.
- Качение и касательность предполагают касание между двумя колесами, а также одновременное вращение колес.
Шарниры качения, "Качение "цилиндр на плоскости"", "Качение "цилиндр на цилиндре"" и "Качение "цилиндр в цилиндре"" предоставляют доступ к параметру "КПД". Значения от 0,001 до 1,0 представляют выход энергии от ведущей шестерни до выходной шестерни. Если шарнир качения создан автоматически с помощью Мастера проектирования цилиндрических зубчатых зацеплений, параметр "КПД" задается автоматически и доступ к нему запрещен. Параметр "КПД" находится на вкладке "Параметры свойств соединения" в разделе "Нагрузки".
Предварительные действия
Построение этих соединений выполняется аналогично построению шарниров скольжения.
- Открыть файл сборки.
В разделе "Подготовка сборок для динамического моделирования" содержатся советы по подготовке сборки к динамическому моделированию .
- Выберите на ленте
вкладку «Среды»
 панель «Начало»
«Динамическое моделирование»
.
панель «Начало»
«Динамическое моделирование»
. - Выберите на ленте
вкладку "Динамическое моделирование"
панель "Соединение"
"Вставить соединение"
 .
. - Чтобы выбрать тип соединения в диалоговом окне "Вставка соединения", щелкните стрелку вниз в поле типов соединения или щелкните
 значок "Отобразить таблицу соединений".
значок "Отобразить таблицу соединений".
Действия, которые осталось выполнить, зависят от типа добавляемого шарнира качения. Выберите тип соединения, из приведенных ниже, чтобы просмотреть действия, которые необходимо выполнить для вставки этого типа соединения.
Шарнир качения: цилиндр на плоскости
Для этих соединений движение второго компонента должно происходить в плоскости относительно первого компонента.
- В меню типов соединения или в таблице соединений выберите "Шарниры качения: цилиндр на плоскости".
- В диалоговом окне "Вставка соединения" выберите одну зависимость: качение или две зависимости: качение и касательность.
Соединение "Качение "цилиндр на плоскости"" с одной зависимостью следует вставлять после того, как в процессе моделирования правильно определено положение цилиндра и плоскости и задана касательность. Цилиндр и плоскость расположены правильно, если ось Z цилиндра находится на фиксированном расстоянии (радиус цилиндра) от плоскости.
Существует жесткий критерий проверки касательности. Убедитесь, что компоненты являются геометрически касательными.
Соединение "Качение "цилиндр на плоскости"" с двумя зависимостями следует вставлять, если необходимо задать и поддерживать касательность между цилиндром и плоскостью. Зависимость касательности создает нормальную нагрузку.
По умолчанию используются две зависимости: качение и касательность.
- В графическом окне укажите плоскость на первом компоненте (плоскость системы координат X-Z).
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения на плоскости.
- Укажите плоскость X-Y, выбрав плоскость контакта.Совет: Если не удается выбрать геометрический объект, нажмите кнопку
 и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.
и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите начало системы координат соединения.
Начало системы координат соединения для первого компонента находится в точке, в которой плоскость связана с цилиндром.
- Если в качестве первого объекта выбрана плоскость, выберите ось Z, чтобы определить нормаль к плоскости. Если в качестве первого объекта выбрана ось Z, выберите ось X, чтобы определить плоскость.
- Укажите плоскость X-Y, выбрав плоскость контакта.
- Укажите систему координат соединения для цилиндра.
- Выберите цилиндр.
- Выберите начало системы координат соединения.
- При необходимости в диалоговом окне "Вставка соединения" выберите "Поменять X" или "Поменять Z", чтобы изменить направление оси X или оси Z системы координат соединения для первого компонента.
- Нажмите "OK".
Шарнир качения: цилиндр на цилиндре
Для этих соединений движение второго компонента должно происходить в плоскости относительно первого компонента.
- В меню типов соединения или в таблице соединений выберите "Шарниры качения: цилиндр на цилиндре.
- В диалоговом окне "Вставка соединения" выберите одну зависимость: качение или две зависимости: качение и касательность.
Соединение "Качение "цилиндр на цилиндре"" с одной зависимостью следует вставлять после того, как в процессе моделирования правильно определено положение двух цилиндров и задана касательность. Положение цилиндров определено правильно, если оси Z этих цилиндров расположены на фиксированном расстоянии (составляющем сумму радиусов этих цилиндров) друг от друга.
Существует жесткий критерий проверки касательности. Убедитесь, что компоненты являются геометрически касательными.
Соединение "Качение "цилиндр на цилиндре"" с двумя зависимостями следует вставлять, если необходимо задать и поддерживать касательность между двумя цилиндрами. Зависимость касательности создает нормальную нагрузку.
По умолчанию используются две зависимости: качение и касательность.
- В графическом окне укажите систему координат соединения для компонента, содержащего первый цилиндр.
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения первого компонента.
- Выберите первый цилиндр.Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.
Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите начало системы координат соединения.
Начало системы координат соединения для первого компонента находится в точке, в которой компонент связан со вторым компонентом.
- Выберите ось X.
- Выберите первый цилиндр.
- Повторите шаг 3 для компонента, содержащего второй цилиндр.
- При необходимости в диалоговом окне "Вставка соединения" выберите "Поменять X", чтобы изменить направление оси X обоих компонентов.
- Нажмите "OK".
Если вставляется соединение с одной зависимостью, а цилиндры не являются касательными, программа выдает предупреждение о том, что расстояние между двумя осями не равно сумме радиусов цилиндров.
Если вставляется соединение с двумя зависимостями и цилиндры касательны, программа выдает предупреждение о наличии в механизме одной степени избыточности.
Шарнир качения: цилиндр в цилиндре
Для этих соединений движение второго компонента должно происходить в плоскости относительно первого компонента.
- В меню типов соединения или в таблице соединений выберите "Шарниры качения: цилиндр в цилиндре.
- В диалоговом окне "Вставка соединения" выберите одну зависимость: качение или две зависимости: качение и касательность.
Соединение "Качение "цилиндр в цилиндре"" с одной зависимостью следует вставлять после того, как в процессе моделирования правильно определено положение двух цилиндров и задана касательность. Положение цилиндров определено правильно, если ось Z внутреннего цилиндра расположена на фиксированном расстоянии (составляющем радиус внутреннего цилиндра) от внутренней поверхности внешнего цилиндра.
Существует жесткий критерий проверки касательности. Убедитесь, что компоненты являются геометрически касательными.
Соединение "Качение "цилиндр в цилиндре"" с двумя зависимостями следует вставлять, если необходимо задать и поддерживать касательность между двумя цилиндрами. Зависимость касательности создает нормальную нагрузку.
По умолчанию используются две зависимости: качение и касательность.
- В графическом окне укажите систему координат соединения для компонента, содержащего внешний цилиндр.
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения первого компонента.
- Выберите внешний цилиндр.Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.
Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите начало системы координат соединения.
Начало системы координат соединения для первого компонента находится в точке, в которой компонент связан со вторым компонентом.
- Выберите ось X.
- Выберите внешний цилиндр.
- Повторите шаг 3 для компонента, содержащего внутренний цилиндр.
- При необходимости в диалоговом окне "Вставка соединения" выберите "Поменять X", чтобы изменить направление оси X обоих компонентов.
- Нажмите "OK".
Если вставляется соединение с одной зависимостью, а цилиндры не являются касательными, программа выдает предупреждение о том, что расстояние между двумя осями не равно сумме радиусов цилиндров.
Если вставляется соединение с двумя зависимостями и цилиндры касательны, что обеспечивается остальными объектами замкнутой кинематической цепи, программа выдает предупреждение о наличии в механизме одной степени избыточности.
Шарнир качения: цилиндр-кривая
Для этих соединений движение второго компонента должно происходить в плоскости относительно первого компонента.
- В меню типов соединения или в таблице соединений выберите "Шарниры качения: цилиндр-кривая.
- В графическом окне укажите систему координат соединения для компонента, содержащего кривую.
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения первого компонента.
- Выберите на эскизе изогнутую грань, ребро или замкнутый контур.Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.
Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите ребро для кривой.
- Выберите на эскизе изогнутую грань, ребро или замкнутый контур.
- В графическом окне укажите систему координат соединения для компонента, содержащего цилиндр.
- Выберите цилиндр.
- Выберите начало системы координат соединения.
- Нажмите "OK".
Ремень
Для этих соединений оси вращения двух компонентов должны быть параллельны, другими словами соединение действует между двумя шкивами, которые находятся в одной плоскости. Ременное соединение будет действовать, только при наличии фиксированного расстояния между центрами цилиндров.
- В меню типов соединения или в таблице соединений выберите "Ремень".
- В диалоговом окне "Вставка соединения" выберите "Прямой ремень" или "Перекрещенный ремень".
По умолчанию используется прямой ремень.
- В графическом окне укажите систему координат соединения для компонента, содержащего первый цилиндр.
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения первого компонента.
- Выберите один цилиндр.
Осью цилиндра должна быть ось Z системы координат соединения.
Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите начало системы координат соединения.
Начало системы координат соединения для первого компонента находится в точке, в которой компонент связан со вторым компонентом.
- Выберите ось X.
- Выберите один цилиндр.
- Повторите шаг 3 для компонента, содержащего второй цилиндр.
- При необходимости в диалоговом окне "Вставка соединения" выберите "Поменять X", чтобы изменить направление оси X.
- Нажмите "OK".
Шарнир качения: конус на плоскости
Для данного типа соединения конус должен быть касательным к плоскости. Для обеспечения касательности в процессе моделирования следует использовать другие типы соединений.
- В меню типов соединения или в таблице соединений выберите "Шарниры качения: конус на плоскости.
- В графическом окне выберите плоскость.Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.
Результаты будут выражены в системе координат соединения на плоскости.
- Выберите конус.
Программа автоматически разместит две системы координат соединения.
- Нажмите "OK".
Шарнир качения: конус на конусе
Для данного типа соединения второй конус должен быть касательным к первому. Для обеспечения касательности в процессе моделирования следует использовать другие типы соединений.
- В меню типов соединения или в таблице соединений выберите "Шарниры качения: конус на конусе.
- В графическом окне выберите первый конус.
Если в выбранном компоненте отсутствует конус, он будет создан модулем "Динамическое моделирование", а затем будут выбраны его основание и радиус (R1). Вершина конуса будет расположена в точке пересечения осей Y системы координат двух компонентов.
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения первого компонента.
- Выберите ось Y или конус.Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.
Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите начало системы координат соединения.
- Выберите ось Y или конус.
- Выберите ось Y системы координат соединения компонента, содержащего второй конус.
- При необходимости в диалоговом окне "Вставка соединения" выберите "Поменять Y", чтобы изменить направление оси Y.
- Нажмите "OK".
Шарнир качения: конус в конусе
Для данного типа соединения внутренний конус должен быть касательным к внешнему. Для обеспечения касательности в процессе моделирования следует использовать другие типы соединений.
- В меню типов соединения или в таблице соединений выберите "Шарниры качения: конус в конусе.
- В графическом окне укажите систему координат соединения для компонента, содержащего внешний конус.
Если в выбранном компоненте отсутствует конус, он будет создан модулем "Динамическое моделирование", а затем будут выбраны его основание и радиус (R1). Вершина конуса будет расположена в точке пересечения осей Y системы координат двух компонентов.
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения первого компонента.
- Выберите ось Y.Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.
Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите начало системы координат соединения.
- Выберите ось Y.
- Выберите ось Y системы координат соединения для внутреннего конуса.
- При необходимости в диалоговом окне "Вставка соединения" выберите "Поменять Y", чтобы изменить направление оси Y.
- Нажмите "OK".
Винт
Как и другие шарниры качения, винтовые соединения действуют между компонентами при наличии у последних относительных степеней свободы. Винтовое соединение объединяет степень свободы вращения и перемещения. По умолчанию программа создает цилиндрическое соединение для обеспечения двух степеней свободы между двумя компонентами перед созданием винтового соединения.
- В меню типов соединения или в таблице соединений выберите "Винт".
- В диалоговом окне "Вставка соединения" установите флажок "Создать цилиндрическое соединение", если необходимо, чтобы программа сначала создавала цилиндрическое соединение между двумя компонентами.
Прежде чем вставить винтовое соединение, между двумя компонентами должно быть создано цилиндрическое соединение.
- В графическом окне укажите систему координат соединения для первого компонента.
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения первого компонента.
- Выберите ось Z, которая выполняет функцию оси степеней свободы перемещения и вращения.Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Это упрощает выбор объекта в компоненте.
Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите начало системы координат соединения.
Начало системы координат соединения для первого компонента находится в точке, в которой компонент связан со вторым компонентом.
- Выберите ось X.
- Выберите ось Z, которая выполняет функцию оси степеней свободы перемещения и вращения.
- Повторите шаг 3 для второго компонента.
- При необходимости в диалоговом окне "Вставка соединения" выберите "Поменять Z", чтобы изменить направление оси Z или "Поменять X", чтобы изменить направление оси X.
- Введите шаг винта.
- Нажмите "OK".
Червячная передача
Как и другие шарниры качения, червячная передача действует между компонентами при наличии у последних относительных степеней свободы. Червячная передача объединяет две степени свободы вращения, перпендикулярные друг другу.
- В меню типов соединения или в таблице соединений выберите "Червячная передача".
- В графическом окне укажите систему координат соединения для компонента, содержащего передачу.
Система координат соединения может не совпадать с системой координат компонента.
Результаты будут выражены в системе координат соединения первого компонента.
- Выберите ось Z.Совет: Если не удается выбрать геометрический объект, нажмите кнопку и выберите компонент в графическом окне. Эта функция упрощает выбор объекта в компоненте.
Хотя для задания системы координат соединения не всегда требуется выбирать дополнительные геометрические объекты, ее рекомендуется указывать как можно более точно.
- Выберите начало системы координат соединения.
Начало системы координат соединения для первого компонента находится в точке, в которой передача связана с винтом.
- Выберите ось X.
- Выберите ось Z.
- Укажите систему координат соединения для компонента, содержащего винт.
- Выберите ось Z.
- Выберите начало системы координат соединения.
- Выберите ось X.
- При необходимости в диалоговом окне "Вставка соединения" выберите "Поменять Z", чтобы изменить направление оси Z или "Поменять X", чтобы изменить направление оси X.
- Введите шаг винта.
- Нажмите "OK".
 Демонстрационный ролик о создании цилиндрического соединения качения
Демонстрационный ролик о создании цилиндрического соединения качения