In CATMotion ist auch das Retargeting-System von CAT integriert, das gegenüber Standard-IK zwei Vorteile aufweist: Erstens beseitigt Retargeting das Problem des Einrastens am Kniegelenk aufgrund einer Überdehnung der IK-Kette, und zweitens erhält die Figur automatisch "Gewicht", da das Bein das Becken nach oben drückt.
Da Retargeting vollständig gerade Beine ermöglicht, können Sie es für Gehweisen einsetzen, die mit IK schwer und unmöglich zu erreichen wären.
In CATMotion wird das Retargeting durch eine Kombination von zwei Controllern gesteuert: "Kniewinkel" und "Beingewichtung".
Kniewinkel
Der Gehzyklus wird in vier Kniewinkel aufgeteilt. Die Steuerung der Kniewinkel läuft über den Controller "Kniewinkel", der im CATMotion-Editor unter "Beine" zu finden ist.
Wir geben den vier Kniewinkeln die anschaulichen Namen "Abheben", "MitteAbgehoben", "Aufsetzen" und "MitteAufgesetzt".
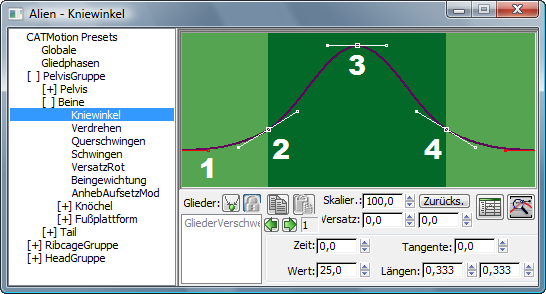
1. MitteAufgesetzt
2. Abheben
3. MitteAbgehoben
4 ändert sich. Aufsetzen
- MitteAufgesetzt
-
Der Winkel des Knies zwischen Aufsetzen und Abheben.
- Abheben
-
Der Winkel des Knies, kurz bevor der Fuß den Boden verlässt.
- MitteAbgehoben
-
Der Winkel des Knies, wenn der Fuß den halben Weg bis zum Aufsetzen zurückgelegt hat.
- Aufsetzen
-
Der Winkel des Knies, wenn der Fuß wieder auf dem Boden platziert wird.
Beingewichtung
Der andere für das Retargeting wichtige Controller heißt "Beingewichtung". Sie finden Ihn beim Kniewinkel-Controller im CATMotion-Editor unter "Beine".
Das Beingewichtungsdiagramm steuert die Kraft, mit der die Fußplattform auf die Bodenebene zurückgezogen wird. Wenn die Beingewichtung 0 beträgt und der Kniewinkel vergrößert wird, wird der Fuß weiter vom Boden weggezogen. Wenn die Beingewichtung 1,0 beträgt und der Kniewinkel vergrößert wird, wird das Becken nach unten gezogen.
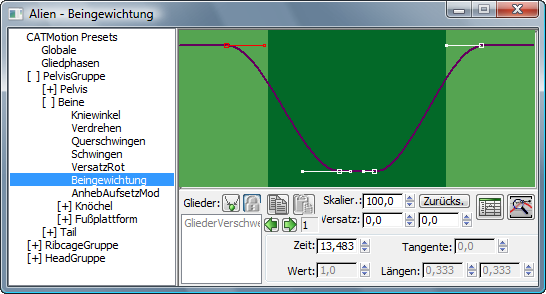
Die Beingewichtung kann auch als Beinpriorität verstanden werden. Die linke Seite des Diagramms ist die Priorität beim Abheben und die rechte Seite die Priorität beim Aufsetzen. Dies ist wichtig, wenn Sie versuchen, die Winkel über die körperlichen Grenzen hinaus zu vergrößern. Indem Sie dann die eine Beingewichtung auf 1,0 und die andere auf 0,0 einstellen, können Sie steuern, wo der Fehler hauptsächlich auftritt. In der Regel sollte dasjenige Bein, das aufgesetzt wird, Priorität erhalten.
Der Fehler im System wird in den Knöcheln absorbiert. Wenn Sie feststellen, dass sich die Knöchel zu gerade nach oben bewegen oder auf andere Weise seltsam verhalten, versuchen Sie, Beingewichtung oder Kniewinkel anzupassen.
In der Regel versucht man zunächst, die maximale Schrittlänge zu reduzieren oder die verschiedenen Kniewinkel zu vergrößern oder zu verkleinern.
Wenn die Bewegung etwas hölzern wirkt, muss möglicherweise das Beingewichtungsdiagramm geglättet werden. Wenn die Knöchel beim Abheben des Fußes zu steil nach oben gehen, könnte dies daran liegen, dass die Beingewichtung im Abheben-Teil des Diagramms zu spät abfällt.
Rennen und Retargeting
Retargeting ist zwar nützlich fürs Gehen, aber keine eine ideale Lösung zum Rennen. Derzeit ist es fast unmöglich, einen brauchbaren Übergang für die Bewegungsphase zu erstellen, wo das Beingewicht in den Hintergrund tritt und die Beine zu "fliegen" beginnen.
Vorerst empfehlen wir, IK zur Animation rennender und springender Figuren zu verwenden.