표면 도달 동작은 오브젝트를 대리자의 정지 대상이나 움직이는 대상으로 지정할 수 있다는 점에서 찾기 동작과 유사합니다. 주요 차이점은 표면 도달의 경우 대리자가 대상에 도달할 때 중지되도록 할 수 있습니다. 대리자가 오브젝트에서 중지하는 위치와 중지되기 전에 대상에 접근하는 방법을 어느 정도까지 지정할 수도 있습니다.
-
 만들기 패널 >
만들기 패널 >  (도우미) > 오브젝트 유형 롤아웃 > 군중 > 설정 롤아웃 > 동작 그룹 > 새로 만들기 버튼 클릭 > 동작 유형 선택 대화상자 > 표면 도달 동작
(도우미) > 오브젝트 유형 롤아웃 > 군중 > 설정 롤아웃 > 동작 그룹 > 새로 만들기 버튼 클릭 > 동작 유형 선택 대화상자 > 표면 도달 동작
-
군중 오브젝트 선택 >
 수정 패널 > 설정 롤아웃 > 동작 그룹 > 새로 만들기 버튼 클릭 > 동작 유형 선택 대화상자 > 표면 도달 동작
수정 패널 > 설정 롤아웃 > 동작 그룹 > 새로 만들기 버튼 클릭 > 동작 유형 선택 대화상자 > 표면 도달 동작
-
군중 오브젝트 선택 > 수정 패널 > 설정 롤아웃 > 동작 그룹 > 드롭다운 리스트에서 표면 도달 선택
이 동작의 사용 예로 새가 일렬로 늘어선 전신주 위를 날아간 다음 각 새가 다른 전신주 위에 내려앉는 경우를 들 수 있습니다.
인터페이스
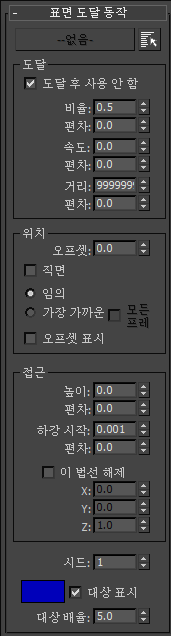
- [대상 버튼]
- 단일 대상을 지정합니다. 이 버튼을 클릭한 다음 뷰포트에서 대상 오브젝트를 클릭합니다. 대상 이름이 버튼에 나타납니다. 대상을 선택하기 전에는 레이블이 "없음"으로 표시됩니다.
다중 선택(다음 항목 참조)을 사용하여 여러 대상을 선택한 경우 "다중"이라는 레이블이 버튼에 나타납니다. 대상으로 지정되는 오브젝트를 보려면 다중 선택 버튼을 클릭합니다.
 다중 선택
다중 선택- 선택 대화상자를 열어 다중 대상을 지정할 수 있습니다.
둘 이상의 대상이 있는 경우 그룹에서 가장 가까운 대상이나 대상 위치의 계산된 평균으로 이동하도록 대리자를 설정할 수 있습니다.
도달 그룹
비율, 속도, 거리의 표면 도달 동작의 세 측면을 지정합니다.
- 도달 후 사용 안 함
- 설정하면 대리자가 표면에 도달한 후 표면 도달 동작을 끕니다. 기본적으로 설정되어 있습니다.
- 비율
- 도달 시도 시의 가속도를 지정하는 대리자 최대 가속 설정의 배수입니다. 값이 1.0이면 대리자의 전체 가속을 사용합니다. 기본값은 0.5입니다.
- 편차
- 비율 설정에 무작위 변형을 추가합니다.
실제 편차는 편차 설정에 -1에서 1 사이의 난수를 곱한 다음 그 결과에 Rate 설정을 곱하여 계산됩니다. 기본값은 0.0입니다.
- 속도
- 대상 속도에 대해 상대적인 도달 속도입니다. 기본값은 0.0입니다.
- 편차
- 속도 설정에 무작위 변형을 추가합니다. 기본값은 0.0입니다.
실제 편차는 편차 설정에 -1에서 1 사이의 난수를 곱한 다음 그 결과에 속도 설정을 곱하여 계산됩니다.
- 거리
- 대상으로부터의 최대 방사형 거리로 이 거리 내에서 동작이 활성화됩니다. 기본값은 9999999.0입니다.
대리자가 이 반지름 내에 있을 때까지 동작이 아무 영향도 주지 않습니다.
- 편차
- 거리 설정에 무작위 변형을 추가합니다.
실제 편차는 편차 설정에 -1에서 1 사이의 난수를 곱한 다음 그 결과에 거리 설정을 곱하여 계산됩니다. 기본값은 0.0입니다.
위치 그룹
- 간격띄우기
- 대리자가 사용할 표면 법선에 기반하여 계산된 도착점으로부터 일정한 거리를 지정합니다. 기본값은 0.0입니다.
- 직면
- 설정하면 대리자가 마주보는 표면의 삼각형 점에만 도달하려고 시도합니다. 기본적으로 해제되어 있습니다.
- 임의(기본값) character studio에서 대상 표면의 임의 점을 도착점으로 선택합니다.
임의 옵션을 사용하는 경우 character studio에서는 시뮬레이션을 시작할 때 대리자의 도착점을 한 번 선택합니다.
- 가장 가까운character studio에서 대상 표면의 가장 가까운 점을 도착점으로 선택합니다.
가장 가까운이 선택되었지만 모든 프레임이 해제된 경우 character studio에서는 시뮬레이션을 시작할 때 대리자의 도착점을 한 번 선택합니다.
모든 프레임설정하면 character studio에서는 프레임마다 대리자에 대해 도착점을 선택합니다. 가장 가까운이 선택된 경우에만 사용할 수 있습니다. 기본적으로 해제되어 있습니다.
모든 프레임은 애니메이션 중에 대상 오브젝트가 회전하는 경우에 유용하지만 계산 시간이 더 오래 걸립니다.
- 간격띄우기 표시
- 설정하면 표면에 수직인 표면 오브젝트의 각 정점에서 나오는 선으로 간격띄우기 거리를 표시합니다.
접근 그룹
높이 및 하강 설정은 대리자가 도착 시 사용할 경로를 지정합니다. 점진적인 소프트 착지에서 헬리콥터 유형의 직접 하강에 이르기까지 다양한 동작을 허용합니다.
두 경우 모두, 실제 편차는 편차 설정에 -1에서 1 사이의 난수를 곱한 다음 그 결과에 관련 값을 곱하여 계산됩니다.
- 높이
- 면 법선을 따라 도착점으로부터의 거리를 지정합니다.
대리자가 도착점으로 하강하기 전에 처음으로 이동할 점입니다.
- 편차
- 높이 설정에 무작위 변형을 추가합니다.
실제 편차는 편차 설정에 -1에서 1 사이의 난수를 곱한 다음 그 결과에 높이 설정을 곱하여 계산됩니다.
- 하강 시작
- 하강이 시작되는 도착점과 대리자 사이의 거리를 지정합니다. 주: 하강을 시작할 시기와 비교하여 속도가 너무 높고 감속이 너무 낮으므로 하강 시 대리자가 오버슈트되지 않도록 하강 시작을 충분히 높게 설정해야 합니다.
- 편차
- 하강 시작 설정에 무작위 변형을 추가합니다.
실제 편차는 편차 설정에 -1에서 1 사이의 난수를 곱한 다음 그 결과에 하강 시작 설정을 곱하여 계산됩니다.
- 이 법선 해제
- 설정하면 접근 벡터를 설정하여 최종 접근이 수행되는 각도를 지정할 수 있습니다. 기본적으로 해제되어 있습니다.
X/Y/Z이러한 스피너를 사용하여 표준 좌표로 최종 접근 벡터를 지정합니다. 예를 들어 X=0, Y=0, Z=1의 기본 설정으로 지정된 벡터는 대리자가 수직 표준 축을 따라 대상에 접근합니다.
- 시드
-
편차 설정을 계산하는 데 사용되는 난수에 영향을 줍니다.
여러 표면 도달 동작에서 유사한 무작위화를 수행하려면 동일한 시드 값을 사용합니다.
- [대상 아이콘 색상 견본]
-
대상 아이콘을 그리는 데 사용되는 색상을 표시합니다. 기본값은 진한 파란색입니다.
대상 표시대리자에 대해 새 중간 목표를 계산할 때 솔루션 중에 나타나는 대상 아이콘 표시를 활성화합니다. 중간 목표는 접근 그룹 설정을 사용할 때 만들어집니다. 기본적으로 설정되어 있습니다.
- 대상 배율
- 대상 아이콘의 전체 크기를 지정합니다. 기본값은 5.0입니다.