회피 동작을 사용하면 대리자가 피해야 하는 오브젝트를 지정할 수 있습니다. 대리자는 군중 시뮬레이션 중에 지정된 오브젝트에 접근하면 필요한 경우 회전 및/또는 중지를 통해 벗어납니다.
-
 만들기 패널 >
만들기 패널 >  (도우미) > 오브젝트 유형 롤아웃 > 군중 > 설정 롤아웃 > 동작 그룹 > 새로 만들기 버튼 클릭 > 동작 유형 선택 대화상자 > 회피 동작
(도우미) > 오브젝트 유형 롤아웃 > 군중 > 설정 롤아웃 > 동작 그룹 > 새로 만들기 버튼 클릭 > 동작 유형 선택 대화상자 > 회피 동작
-
군중 오브젝트 선택 >
 수정 패널 > 설정 롤아웃 > 동작 그룹 > 새로 만들기 버튼 클릭 > 동작 유형 선택 대화상자 > 회피 동작
수정 패널 > 설정 롤아웃 > 동작 그룹 > 새로 만들기 버튼 클릭 > 동작 유형 선택 대화상자 > 회피 동작
-
군중 오브젝트 선택 > 수정 패널 > 설정 롤아웃 > 동작 그룹 > 드롭다운 리스트에서 회피 선택
 명령 입력: 만들기 패널
명령 입력: 만들기 패널  도우미 오브젝트 유형 롤아웃 군중 설정 롤아웃 새로 만들기 버튼 회피 동작 명령 입력: 군중 오브젝트 선택 수정 패널 설정 롤아웃 새로 만들기 버튼 회피 동작
도우미 오브젝트 유형 롤아웃 군중 설정 롤아웃 새로 만들기 버튼 회피 동작 명령 입력: 군중 오브젝트 선택 수정 패널 설정 롤아웃 새로 만들기 버튼 회피 동작이 동작은 피할 스티어링, 밀어내기, 벡터 필드의 세 가지 서로 다른 방법을 사용하여 대리자 서로 간 또는 다른 오브젝트를 피하도록 합니다.
피할 스티어링 동작은 근접할 때 서로를 피하는 동물에 가장 적합합니다. 일반적으로 땅에 고착된 동물과 물고기가 이러한 경우에 해당합니다. 스티어링 모션은 동작이 비교적 짧은 기간 동안 사용되므로 갑작스러울 수 있습니다.
반면 밀어내기 회피 동작은 서로 밀어내는 자기장의 연속 동작을 흉내냅니다. 새, 박쥐 및 날아다니는 곤충은 큰 밀어내기 필드를 사용할 때 가장 잘 애니메이션되며, 이 경우 적절한 오류 한계를 유지하는 동시에 부드럽게 서로를 피할 수 있습니다. 반발력은 이동 방향에 관계없이 모든 측면에서의 침입을 차단합니다. 따라서 주로 피할 스티어링을 사용하는 동물도 밀집된 차량을 통과할 때 공간 분리를 유지하기 위해 어느 정도 밀어내기 회피를 사용해야 합니다. 밀어내기 회피력은 항상 구형 모양의 바깥으로 균일하게 적용됩니다.
군중이 임의의 3ds Max 오브젝트의 복잡한 모양을 건드리지 않아야 하는 경우에 벡터 필드 회피를 사용합니다. 벡터 필드 회피에서 바깥쪽으로 적용되는 힘은 아무 오브젝트의 모양이라도 만들 수 있습니다. 예를 들어 침몰한 선박 주위를 헤엄쳐다니는 물고기 떼를 애니메이션한다고 가정합니다. 이 경우 선박 모양을 주변 공간으로 확장하도록 벡터 필드를 만들 수 있습니다. 이 필드는 선박의 표면 법선을 선박을 둘러싸는 3D 격자로 변환하는 스캔에 의해 계산됩니다. 이러한 법선은 3D 격자의 "비콘"으로 공간에 확장되어 선박 모양에서 멀리 헤엄치는 최상의 방법을 물고기에 지정합니다. 물고기가 벡터 필드 격자 공간으로 들어오면 선박의 표면에서 내보내는 회피력을 따라 정확하게 물고기를 쫓아낼 수 있습니다.
인터페이스
- [대상 버튼]
- 단일 대상을 지정합니다. 이 버튼을 클릭한 다음 뷰포트에서 대상 오브젝트를 클릭합니다. 대상 이름이 버튼에 나타납니다.
다중 선택을 사용하여 다중 대상을 선택한 경우(다음 항목 참조) "Multiple"이란 단어가 버튼에 나타납니다. 대상으로 지정되는 오브젝트를 보려면 다중 선택 버튼을 클릭합니다.
 다중 선택
다중 선택- 선택 대화상자를 열어 다중 대상을 지정할 수 있습니다. 둘 이상의 대상이 있는 경우 그룹에서 가장 가까운 대상이나 대상 위치의 계산된 평균으로 이동하도록 대리자를 설정할 수 있습니다.
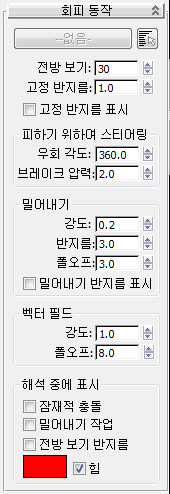
- 전방 보기
- character studio에서 잠재적 충돌을 찾는 현재 프레임 이전의 프레임 수입니다. 기본값은 30입니다.
- 고정 반지름
- 대상의 피벗점에서의 거리로, 침투가 발생하지 않는 대리자 경계 구의 배수입니다. 기본값은 1.0입니다. 팁: 고정 반지름 중심이 피벗점이기 때문에 상자 원형과 같이 피벗점이 중심에 없는 대상 오브젝트에서는 방지가 예상대로 작동하지 않을 수 있습니다. 최상의 결과를 얻으려면 계층 패널 피벗 조정 롤아웃 컨트롤을 사용하여 피벗을 오브젝트 중심에 놓습니다.
- 고정 반지름 표시
- 고정 반지름 설정 범위를 나타내는 와이어프레임 구의 표시를 활성화합니다. 기본적으로 해제되어 있습니다.
피할 스티어링 그룹
피할 스티어링은 대리자의 현재 속도와 방향을 기준으로 이후의 예상 충돌을 정확하게 피하기 위해 대리자가 사용합니다. 이 방법을 사용하는 대리자는 매우 근접하여 서로를 통과할 수 있습니다.
- 우회 각도
- 필요한 최대 회전 각도로서 대리자가 속도를 늦추고 대기하기보다 방향을 전환하여 회피하려는 대리자의 목표의 방향에 상대적입니다. 기본값은 360입니다. 범위는 0에서 360 사이입니다. 팁: 회피하기 위한 회전을 비활성화하여 제동만 허용하려면 우회 각도를 0으로 설정합니다. 이는 대리자가 목표를 향해 방향을 계속 유지하게 만들어서 콘서트가 끝난 후 청중이 출구를 나가기 위해 줄을 서서 기다리는 것과 같이 대리자의 앞에 빈 공간이 날 때까지 속도를 낮추고 기다리도록 합니다
- 브레이크 압력
- 대리자가 회피할 오브젝트를 만날 때 반응하는 강도를 결정합니다. 값이 높을수록 대리자가 속도를 늦추거나 중지할 가능성이 큽니다. 값이 낮으면 대리자가 계속 진행할 수 있도록 방해물 우회 방법을 찾게 되며, 이로 인해 예기치 않은 방향으로 바뀔 수 있습니다. 기본값은 2.0입니다.
밀어내기 그룹
밀어내기는 공간 위치만 기준으로 하는 일반적인 분리력입니다. 대리자는 밀어내기를 사용하여 서로 옆으로 스치거나 피할 스티어링을 사용할 수 없을 만큼 근접하는 경우를 방지합니다.
- 강도
- 반발력의 강도를 결정합니다. 값이 높을수록 반발력이 커집니다. 기본값은 0.2이며 범위는 0.0에서 1.0 사이입니다.
- 반지름
- "밀어내기" 회피가 감지되고 수행되는 대리자의 경계 구로부터의 최대 거리입니다. 기본값은 3.0입니다.
- 폴오프
- 밀어내기 반지름과 고정 반지름 사이에 강도가 감소하는 속도입니다. 값이 1.0이면 선형 폴오프를 나타냅니다. 값이 높을수록 거리에 따라 강도가 더 빠르게 0으로 떨어지므로 효과가 대리자 고정 반지름에 더 가까운 곳에 집중됩니다. 값이 낮으면 감소 속도가 줄어들며 폴오프 설정이 0.0이면 반지름 거리와 고정 반지름의 강도가 같음을 나타냅니다. 기본값은 3.0입니다.
- 밀어내기 반지름 표시
- 밀어내기 설정 범위를 나타내는 와이어프레임 구의 표시를 활성화합니다. 기본적으로 해제되어 있습니다.
벡터 필드 그룹
벡터 필드 공간 왜곡을 장면의 오브젝트에 적용한 경우 벡터 필드를 회피할 오브젝트로 지정할 수 있습니다. 차이점은 공간 왜곡 동작와 함께 사용할 경우 대리자가 필드의 벡터에 수직으로 이동하도록 지정되어 벡터 필드를 사용하여 오브젝트를 피한다는 것입니다. 회피 동작과 함께 사용할 경우 대리자는 단순히 벡터 방향으로 멀어집니다.
- 강도
- 값이 높을수록 영향력이 커집니다. 대리자는 필드에 수직으로 이동하도록 지정됩니다. 기본값은 1.0이며 범위는 0.0에서 1.0 사이입니다.
- 폴오프
- 값이 높을수록 거리에 따라 벡터 필드 영향력이 더 빠르게 0으로 떨어지므로 효과가 대리자 고정 반지름에 더 가까운 곳에 집중됩니다. 기본값은 8.0입니다.
해석 중에 표시 그룹
군중 시뮬레이션의 디버깅에 이 스위치를 사용합니다. 해결 중에 회피 동작의 여러 측면에 대한 그래픽 은유를 사용하여 시뮬레이션 정보를 표시합니다.
- 잠재적 충돌
- 대리자에서 잠재적 충돌 위치까지 초록색 선을 표시합니다. 기본적으로 해제되어 있습니다.
- 밀어내기 작업
- 반발력이 적용되는 경우 대리자와 대상 사이에 흰색 선을 표시합니다. 기본적으로 해제되어 있습니다.
- 전방 보기 반지름
- 잠재적 충돌 확인에 사용되는 현재 거리를 보여 주는 구를 표시합니다.
- 색상 견본
- 솔루션 중에 회피 힘 벡터를 그리는 데 사용되는 색상을 표시합니다. 다른 색상을 선택하려면 상자를 클릭합니다. 기본값은 빨간색입니다.
- 힘
- 설정하면 회피 동작에서 하나 이상의 대리자에 적용한 힘이 시뮬레이션 솔루션 중에 색상 선으로 뷰포트에 그려집니다. 기본적으로 설정되어 있습니다.