Autodesk 3ds Max Extension 1 中包含几项新功能和针对 Max Creation Graph 的改进。

MCG 动画控制器
您可以使用 MCG 创建自定义动画控制器,根据图形设置对象的可设置动画的参数。“输出”类别中有几个适用于各种控制器(例如:浮点、位置、旋转、变换及其他)的新节点。您还可使用新的隐式参数“变换控制器: 矩阵”获取父对象的值,以便在计算中使用。
成功保存并评估基于 MCG 的控制器之后,它们将自动显示在“轨迹视图”和“运动”面板上相应的“指定控制器”窗口中。
系统提供了多个采样控制器。您可从菜单中应用这些控制器,或将其用作创建您自己的控制器示例。
时间相关的节点
- 新“3ds Max 时间”类别中的所有节点。
- “3ds Max 节点”类别中的 MeshFro NodeAtTime。
- “3ds Max 节点”类别中的 WorldTransformAtTime。
- “隐式参数”类别中的 time:int 2。
模拟
现在,MCG 支持创建模拟。模拟可根据上一帧的值迭代更新。您可以为修改器、控制器和几何体创建模拟图形。
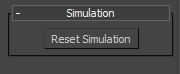
从模拟图形中创建的工具具有额外的“模拟”卷展栏。单击“重置模拟”后,缓存将会清除,且模拟将从开始重新运行到当前时间。此操作非常有用,例如,如果您已修改该工具的任何输入,且希望在当前帧上看到正确的结果。
有关详细信息,请参见创建模拟图形。
Bullet Physics
“Bullet Physics”类别包含几个节点,支持根据 Bullet Phsics 引擎创建刚体模拟。您可以创建一个世界并添加对象和属性,然后在更新世界后,获得世界空间的变换。
MCG 1 DOF 旋转弹簧控制器和 MCG 3 DOF 旋转弹簧控制器这两个基于 MCG 的采样控制器是使用 Bullet Physics 节点构建的模拟示例。
有关如何使用 Bullet Physics 节点创建自己的模拟的概述,请参见构建 Bullet 刚体模拟。
新参数类型
- 参数:IArray<INode> 指定场景中对象的阵列。
- 参数 IArray<Single> 指定浮点值的阵列。
- 参数 Vector3 指定 3D 向量。在图形中不再需要使用这 3 个单一参数并构建向量。
Vector4 支持
支持四维向量。除了用于构建 XYZW 和 RGBA 动画控制器的输出:Point4 控制器以外,Vector4 类别中还存在用于从单一值构建 Vector4 值、从 vector4 中获取单一值以及在 vector4 与四元数之间进行转换的节点。
创建特定类型的空阵列
“阵列”类别中的新 *EmptyArray 节点可用于创建各种类型的阵列(例如,矩阵或 Vector3),而无需向阵列添加特定项。
新操作符和复合
以下是 MCG 中可用的新操作符和复合的列表。
3ds Max 节点
-
GetRayToSurfaceIntersections(nodes, rayToSurfacePivot, rayOrigin, flipAxis, rayAxis)
-
MeshFromNodeAtTime(n, time)
-
NodePosAverage(values)
-
WeightedAveragePosition(Targets, Weights)
-
WorldTransformAtTime(node, time)
3ds Max 时间
-
AnimationPlaybackEnd()
-
AnimationStartTime()
-
FramesToSeconds(frames)
-
FramesToTicks(frames)
-
SecondsToFrames(seconds)
-
SecondsToTicks(seconds)
-
TicksToFrames(ticks)
-
TicksToSeconds(ticks)
阵列
-
BitmapEmptyArray()
-
BooleanEmptyArray()
-
BoundingBoxEmptyArray()
-
BoundingFrustumEmptyArray()
-
BoundingSphereEmptyArray()
-
ConstraintEmptyArray()
-
EdgeEmptyArray()
-
Face3EmptyArray()
-
Face4EmptyArray()
-
INodeEmptyArray()
-
Int32EmptyArray()
-
LineEmptyArray()
-
MapChannelEmptyArray()
-
MatrixEmptyArray()
-
PlaneEmptyArray()
-
QuadMeshEmptyArray()
-
QuaternionEmptyArray()
-
RandomEmptyArray()
-
RayEmptyArray()
-
RayTraceIntersectionEmptyArray()
-
RayTraceSceneEmptyArray()
-
RectangleEmptyArray()
-
RigidBodyDynamicsEmptyArray()
-
SingleEmptyArray()
-
StringEmptyArray()
-
TexmapEmptyArray()
-
TriMeshEmptyArray()
-
Vector3EmptyArray()
-
WorldEmptyArray()
Bullet Physics
-
AddBulletObject(world, worldObject)
-
AddConstraint(world, constraint)
-
AddRigidBody(world, rigidBody)
-
CreateGeneric6DofConstraint(rigidBody1, frame1, rigidBody2, frame2, rotationOrder)
-
CreatePoint2PointConstraint(rigidBody1, pivot1, rigidBody2, pivot2, tau, damping)
-
CreatePointConstraint(rigidBody, pivot, tau, damping)
-
CreateRigidBody(xform, offset, convexHull, rigidBodyDynamics, localInertia, isKinematic)
-
CreateRigidBodyDynamics(mass, friction, rollingFriction, restitution, linearDamping, angularDamping)
-
CreateWorld(initialTime)
-
GetCenterOfMass(convexHull)
-
GetNumberOfRigidBodies(world)
-
GetRigidBodyByIndex(world, index)
-
GetRigidBodyConvexHull(rb)
-
GetRigidBodyWorldTransform(world, rb)
-
GetSimulationTime(world)
-
IsRigidBodyKinematic(rb)
-
ResetWorld(world)
-
SetGeneric6DofConstraintAngularDynamics(constraint, damping, bounce, stiffness)
-
SetGeneric6DofConstraintAngularLimit(constraint, lower, upper, reversed)
-
SetGeneric6DofConstraintLinearDynamics(constraint, damping, bounce, stiffness)
-
SetGeneric6DofConstraintLinearLimit(constraint, lower, upper)
-
AddConstraint(world, constraint)
-
SetGravity(world, gravity)
-
SetRigidBodyVelocity(rb, linear, angular)
-
SetRigidBodyWorldTransform(world, rb, m)
-
SetSimulationTime(world, time)
-
StepSimulation(world, step)
-
TraceRigidBody(world, rb)
复合
-
CreateSimulation(constraints, rigidBodies, startTime, gravity, active, preUpdateFn, currentTime)
-
FilterAndSortRayIntersections(intersections, rays)
控制流
-
IfSingleGreaterThanZero(Value, True, False)
-
LimitSingle(Value, LimitOne, LimitTwo)
-
SwitchOneTwoThree(switchValue, valueIfOne, valueIfTwo, valueIfThree)
几何体 - 矩阵
-
CanDecompose(matrix)
-
ConstructBasisFromUpFwd(upAxis, targetUp, forwardAxis, targetForward)
-
Determinant(matrix)
-
FlipMatrixBasis(matrix)
-
GetMatrixRotation(matrix)
-
GetMatrixScaling(matrix)
-
SetMatrixFrom3Rows(Row1, Row2, Row3)
几何体 - 射线
-
RayFromMatrices(origin, destination)
-
RayFromMatrixAxis(origin, flipAxis, axis)
-
RayIntersectsBox(ray, box)
-
RayIntersectsPlane(ray, plane)
-
RayIntersectsSphere(ray, sphere)
几何体 - TriMesh
-
GetMapChannel(mesh, id)
-
GetMapChannelName(id)
几何体 - Vector4
-
QuaternionToVector4(q)
-
Vector4(x, y, z, w)
-
Vector4ToQuaternion(v)
-
Vector4W(v)
-
Vector4X(v)
-
Vector4Y(v)
-
Vector4Z(v)
几何体 - 向量
-
NormalizedCross(v1, v2)
-
NormalizedCrossWithFlip(Flip, VecOptFlipped, Vec2)
-
PerpToVecInPlane2ndVec(Flip, Vec, Vec2FirstCross)
-
VecNegateIf(Condition, Vec)
隐式参数
-
参考生成器:ReferenceMaker()
-
时间:Int32()
-
变换控制器:Matrix()
输入
-
输入:cache()
-
输入:Constraint()
-
输入:RigidBodyDynamics()
-
输入:World()
输出
-
输出:Color Controller(value)
-
输出:Float Controller(value)
-
输出:Point3 Controller(value)
-
输出:Point4 Controller(value)
-
输出:Position Controller(value)
-
输出:Rotation Controller(value)
-
输出:Scale Controller(value)
-
输出:Transform Controller(value)
参数
-
参数:IArray<INode>()
-
参数:IArray<Single>()
-
参数:Vector3()
通过
-
通过:cache(x)
-
通过:Constraint(x)
-
通过:RigidBodyDynamics(x)
-
通过:World(x)
元组
-
NodeSingleTupleFirst(Tuple2)
-
NodeSingleTupleSecond(Tuple2)