常规特性
本页面所列的角色特性配置了 HumanIK 反向运动学和重定目标解算器的常规操作。
刚度
HIKCollarStiffnessX
围绕 X 轴旋转时,控制角色锁骨节点(LeftCollarNodeId、RightCollarNodeId、LeftCollarExtraNodeId 和 RightCollarExtraNodeId 节点)的灵活性。
值越高,导致锁骨越僵硬,越不倾向于围绕 X 轴旋转;值越低,导致锁骨越灵活,越倾向于围绕 X 轴旋转。
HIKCollarStiffnessY
围绕 Y 轴旋转时,控制角色锁骨节点(LeftCollarNodeId、RightCollarNodeId、LeftCollarExtraNodeId 和 RightCollarExtraNodeId 节点)的灵活性。
值越高,导致锁骨越僵硬,越不倾向于围绕 Y 轴旋转;值越低,导致锁骨越灵活,越倾向于围绕 Y 轴旋转。
HIKCollarStiffnessZ
围绕 Z 轴旋转时,控制角色锁骨节点(LeftCollarNodeId、RightCollarNodeId、LeftCollarExtraNodeId 和 RightCollarExtraNodeId 节点)的灵活性。
值越高,导致锁骨越僵硬,越不倾向于围绕 Z 轴旋转;值越低,导致锁骨越灵活,越倾向于围绕 Z 轴旋转。
膝部和肘部
滚动提取和传播
以下特性控制 HumanIK 处理应用于角色手臂和腿部的滚动旋转(围绕其关联骨骼的平行轴旋转)的方式。有关详细信息,请参见角色特性。
HIKRollExtractionMode
确定 HumanIK 反向运动学解算器从节点到其关联的滚动节点应用滚动旋转所用的方法 - 例如,从 LeftElbowNodeId 节点到 LeftElbowRollNodeId 节点。
HIKLeftUpLegRollId
确定是否提取 LeftHipNodeId 围绕其滚动轴的旋转并将其应用于关节链下的下一个节点。如果角色化,则旋转将应用于 LeftHipRollNodeId,否则旋转将应用于 LeftKneeNodeId。
启用该特性后,该特性值确定了从原始节点提取原始滚动旋转并将其应用于其子节点的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动原始节点。
| 模式类型: |
HIKPropertyOffOn |
| 接受的模式: |
0:LeftHipNodeId 上的所有滚动旋转始终应用于该节点,而不应用于其子节点。 1:提取应用于 LeftHipNodeId 的滚动旋转并将其应用于其子节点的百分比。百分比由该特性的值进行设置。 |
| 默认模式: |
0 |
| 单位类型: |
百分比 |
| 接受的值: |
介于 0.0 和 1.0 之间的值 |
| 默认值: |
0.6 |
HIKLeftUpLegRollExId
确定是否提取 LeftHipRollNodeId 围绕其滚动轴的旋转并将其应用于其子节点:LeftKneeNodeId。该特性的值确定了从滚动节点提取的并将其应用于其子节点的原始滚动旋转的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动滚动节点。
大于 1.0 的值会“过度提取”旋转:它们从滚动节点提取的旋转超过最初从父节点应用于该滚动节点的旋转。这实际上会使滚动节点以其父节点的相反方向旋转。然后,所有从滚动节点提取的旋转将以父节点旋转的原始方向应用于子节点。例如,假设有一个滚动节点并将 90 度的滚动旋转(从其父节点中提取)应用于该节点,然后对于该滚动节点将该值设置为 1.5。滚动节点将旋转回 135 度 (1.5 * 90),其结果相当于反方向旋转 45 度。然后将滚动节点的子节点相对于滚动节点的新位置旋转 135 度,使其显示滚动节点的原始旋转。
HIKLeftLegRollId
确定是否提取 LeftKneeNodeId 围绕其滚动轴的旋转并将其应用于关节链下的下一个节点。如果角色化,则旋转将应用于 LeftKneeRollNodeId,否则旋转将应用于 LeftAnkleNodeId。
启用该特性后,该特性值确定了从原始节点提取原始滚动旋转并将其应用于其子节点的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动原始节点。
| 模式类型: |
HIKPropertyOffOn |
| 接受的模式: |
0:LeftKneeNodeId 上的所有滚动旋转始终应用于该节点,而不应用于其子节点。 1:提取应用于 LeftKneeNodeId 的滚动旋转并将其应用于其子节点的百分比。百分比由该特性的值进行设置。 |
| 默认模式: |
0 |
| 单位类型: |
百分比 |
| 接受的值: |
介于 0.0 和 1.0 之间的值 |
| 默认值: |
0.6 |
HIKLeftKneeRollExId
确定是否提取 LeftKneeRollNodeId 围绕其滚动轴的旋转并将其应用于其子节点:LeftAnkleNodeId。该特性的值确定了从滚动节点提取的并将其应用于其子节点的原始滚动旋转的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动滚动节点。
大于 1.0 的值会“过度提取”旋转:它们从滚动节点提取的旋转超过最初从父节点应用于该滚动节点的旋转。这实际上会使滚动节点以其父节点的相反方向旋转。然后,所有从滚动节点提取的旋转将以父节点旋转的原始方向应用于子节点。例如,假设有一个滚动节点并将 90 度的滚动旋转(从其父节点中提取)应用于该节点,然后对于该滚动节点将该值设置为 1.5。滚动节点将旋转回 135 度 (1.5 * 90),其结果相当于反方向旋转 45 度。然后将滚动节点的子节点相对于滚动节点的新位置旋转 135 度,使其显示滚动节点的原始旋转。
HIKRightUpLegRollId
确定是否提取 RightHipNodeId 围绕其滚动轴的旋转并将其应用于关节链下的下一个节点。如果角色化,则旋转将应用于 RightHipRollNodeId,否则旋转将应用于 RightKneeNodeId。
启用该特性后,该特性值确定了从原始节点提取原始滚动旋转并将其应用于其子节点的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动原始节点。
| 模式类型: |
HIKPropertyOffOn |
| 接受的模式: |
0:RightHipNodeId 上的所有滚动旋转始终应用于该节点,而不应用于其子节点。 1:提取应用于 RightHipNodeId 的滚动旋转并将其应用于其子节点的百分比。百分比由该特性的值进行设置。 |
| 默认模式: |
0 |
| 单位类型: |
百分比 |
| 接受的值: |
介于 0.0 和 1.0 之间的值 |
| 默认值: |
0.6 |
HIKRightHipRollExId
确定是否提取 RightHipRollNodeId 围绕其滚动轴的旋转并将其应用于其子节点:RightKneeNodeId。该特性的值确定了从滚动节点提取的并将其应用于其子节点的原始滚动旋转的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动滚动节点。
大于 1.0 的值会“过度提取”旋转:它们从滚动节点提取的旋转超过最初从父节点应用于该滚动节点的旋转。这实际上会使滚动节点以其父节点的相反方向旋转。然后,所有从滚动节点提取的旋转将以父节点旋转的原始方向应用于子节点。例如,假设有一个滚动节点并将 90 度的滚动旋转(从其父节点中提取)应用于该节点,然后对于该滚动节点将该值设置为 1.5。滚动节点将旋转回 135 度 (1.5 * 90),其结果相当于反方向旋转 45 度。然后将滚动节点的子节点相对于滚动节点的新位置旋转 135 度,使其显示滚动节点的原始旋转。
HIKRightLegRollId
确定是否提取 RightKneeNodeId 围绕其滚动轴的旋转并将其应用于关节链下的下一个节点。如果角色化,则旋转将应用于 RightKneeRollNodeId,否则旋转将应用于 RightAnkleNodeId。
启用该特性后,该特性值确定了从原始节点提取原始滚动旋转并将其应用于其子节点的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动原始节点。
| 模式类型: |
HIKPropertyOffOn |
| 接受的模式: |
0:RightKneeNodeId 上的所有滚动旋转始终应用于该节点,而不应用于其子节点。 1:提取应用于 RightKneeNodeId 的滚动旋转并将其应用于其子节点的百分比。百分比由该特性的值进行设置。 |
| 默认模式: |
0 |
| 单位类型: |
百分比 |
| 接受的值: |
介于 0.0 和 1.0 之间的值 |
| 默认值: |
0.6 |
HIKRightKneeRollExId
确定是否提取 RightKneeRollNodeId 围绕其滚动轴的旋转并将其应用于其子节点:RightAnkleNodeId。该特性的值确定了从滚动节点提取的并将其应用于其子节点的原始滚动旋转的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动滚动节点。
大于 1.0 的值会“过度提取”旋转:它们从滚动节点提取的旋转超过最初从父节点应用于该滚动节点的旋转。这实际上会使滚动节点以其父节点的相反方向旋转。然后,所有从滚动节点提取的旋转将以父节点旋转的原始方向应用于子节点。例如,假设有一个滚动节点并将 90 度的滚动旋转(从其父节点中提取)应用于该节点,然后对于该滚动节点将该值设置为 1.5。滚动节点将旋转回 135 度 (1.5 * 90),其结果相当于反方向旋转 45 度。然后将滚动节点的子节点相对于滚动节点的新位置旋转 135 度,使其显示滚动节点的原始旋转。
HIKLeftArmRollId
确定是否提取 LeftShoulderNodeId 围绕其滚动轴的旋转并将其应用于关节链下的下一个节点。如果角色化,则旋转将应用于 LeftShoulderRollNodeId,否则旋转将应用于 LeftElbowNodeId。
启用该特性后,该特性值确定了从原始节点提取原始滚动旋转并将其应用于其子节点的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动原始节点。
| 模式类型: |
HIKPropertyOffOn |
| 接受的模式: |
0:LeftShoulderNodeId 上的所有滚动旋转始终应用于该节点,而不应用于其子节点。 1:提取应用于 LeftShoulderNodeId 的滚动旋转并将其应用于其子节点的百分比。百分比由该特性的值进行设置。 |
| 默认模式: |
0 |
| 单位类型: |
百分比 |
| 接受的值: |
介于 0.0 和 1.0 之间的值 |
| 默认值: |
0.6 |
HIKLeftShoulderRollExId
确定是否提取 LeftShoulderRollNodeId 围绕其滚动轴的旋转并将其应用于其子节点:LeftElbowNodeId。该特性的值确定了从滚动节点提取的并将其应用于其子节点的原始滚动旋转的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动滚动节点。
大于 1.0 的值会“过度提取”旋转:它们从滚动节点提取的旋转超过最初从父节点应用于该滚动节点的旋转。这实际上会使滚动节点以其父节点的相反方向旋转。然后,所有从滚动节点提取的旋转将以父节点旋转的原始方向应用于子节点。例如,假设有一个滚动节点并将 90 度的滚动旋转(从其父节点中提取)应用于该节点,然后对于该滚动节点将该值设置为 1.5。滚动节点将旋转回 135 度 (1.5 * 90),其结果相当于反方向旋转 45 度。然后将滚动节点的子节点相对于滚动节点的新位置旋转 135 度,使其显示滚动节点的原始旋转。
HIKLeftForeArmRollId
确定是否提取 LeftElbowNodeId 围绕其滚动轴的旋转并将其应用于关节链下的下一个节点。如果角色化,则旋转将应用于 LeftElbowRollNodeId,否则旋转将应用于 LeftWristNodeId。
启用该特性后,该特性值确定了从原始节点提取原始滚动旋转并将其应用于其子节点的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动原始节点。
| 模式类型: |
HIKPropertyOffOn |
| 接受的模式: |
0:LeftElbowNodeId 上的所有滚动旋转始终应用于该节点,而不应用于其子节点。 1:提取应用于 LeftElbowNodeId 的滚动旋转并将其应用于其子节点的百分比。百分比由该特性的值进行设置。 |
| 默认模式: |
0 |
| 单位类型: |
百分比 |
| 接受的值: |
介于 0.0 和 1.0 之间的值 |
| 默认值: |
0.6 |
HIKLeftElbowRollExId
确定是否提取 LeftElbowRollNodeId 围绕其滚动轴的旋转并将其应用于其子节点:LeftWristNodeId。该特性的值确定了从滚动节点提取的并将其应用于其子节点的原始滚动旋转的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动滚动节点。
大于 1.0 的值会“过度提取”旋转:它们从滚动节点提取的旋转超过最初从父节点应用于该滚动节点的旋转。这实际上会使滚动节点以其父节点的相反方向旋转。然后,所有从滚动节点提取的旋转将以父节点旋转的原始方向应用于子节点。例如,假设有一个滚动节点并将 90 度的滚动旋转(从其父节点中提取)应用于该节点,然后对于该滚动节点将该值设置为 1.5。滚动节点将旋转回 135 度 (1.5 * 90),其结果相当于反方向旋转 45 度。然后将滚动节点的子节点相对于滚动节点的新位置旋转 135 度,使其显示滚动节点的原始旋转。
HIKRightArmRollId
确定是否提取 RightShoulderNodeId 围绕其滚动轴的旋转并将其应用于关节链下的下一个节点。如果角色化,则旋转将应用于 RightShoulderRollNodeId,否则旋转将应用于 RightElbowNodeId。
启用该特性后,该特性值确定了从原始节点提取原始滚动旋转并将其应用于其子节点的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动原始节点。
| 模式类型: |
HIKPropertyOffOn |
| 接受的模式: |
0:RightShoulderNodeId 上的所有滚动旋转始终应用于该节点,而不应用于其子节点。 1:提取应用于 RightShoulderNodeId 的滚动旋转并将其应用于其子节点的百分比。百分比由该特性的值进行设置。 |
| 默认模式: |
0 |
| 单位类型: |
百分比 |
| 接受的值: |
介于 0.0 和 1.0 之间的值 |
| 默认值: |
0.6 |
HIKRightShoulderRollExId
确定是否提取 RightShoulderRollNodeId 围绕其滚动轴的旋转并将其应用于其子节点:RightElbowNodeId。该特性的值确定了从滚动节点提取的并将其应用于其子节点的原始滚动旋转的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动滚动节点。
大于 1.0 的值会“过度提取”旋转:它们从滚动节点提取的旋转超过最初从父节点应用于该滚动节点的旋转。这实际上会使滚动节点以其父节点的相反方向旋转。然后,所有从滚动节点提取的旋转将以父节点旋转的原始方向应用于子节点。例如,假设有一个滚动节点并将 90 度的滚动旋转(从其父节点中提取)应用于该节点,然后对于该滚动节点将该值设置为 1.5。滚动节点将旋转回 135 度 (1.5 * 90),其结果相当于反方向旋转 45 度。然后将滚动节点的子节点相对于滚动节点的新位置旋转 135 度,使其显示滚动节点的原始旋转。
HIKRightForeArmRollId
确定是否提取 RightElbowNodeId 围绕其滚动轴的旋转并将其应用于关节链下的下一个节点。如果角色化,则旋转将应用于 RightElbowRollNodeId,否则旋转将应用于 RightWristNodeId。
启用该特性后,该特性值确定了从原始节点提取原始滚动旋转并将其应用于其子节点的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动原始节点。
| 模式类型: |
HIKPropertyOffOn |
| 接受的模式: |
0:RightElbowNodeId 上的所有滚动旋转始终应用于该节点,而不应用于其子节点。 1:提取应用于 RightElbowNodeId 的滚动旋转并将其应用于其子节点的百分比。百分比由该特性的值进行设置。 |
| 默认模式: |
0 |
| 单位类型: |
百分比 |
| 接受的值: |
介于 0.0 和 1.0 之间的值 |
| 默认值: |
0.6 |
HIKRightElbowRollExId
确定是否提取 RightElbowRollNodeId 围绕其滚动轴的旋转并将其应用于其子节点:RightWristNodeId。该特性的值确定了从滚动节点提取的并将其应用于其子节点的原始滚动旋转的百分比。
值为 0.0 时,不将任何滚动传递到子节点,仅移动滚动节点。
大于 1.0 的值会“过度提取”旋转:它们从滚动节点提取的旋转超过最初从父节点应用于该滚动节点的旋转。这实际上会使滚动节点以其父节点的相反方向旋转。然后,所有从滚动节点提取的旋转将以父节点旋转的原始方向应用于子节点。例如,假设有一个滚动节点并将 90 度的滚动旋转(从其父节点中提取)应用于该节点,然后对于该滚动节点将该值设置为 1.5。滚动节点将旋转回 135 度 (1.5 * 90),其结果相当于反方向旋转 45 度。然后将滚动节点的子节点相对于滚动节点的新位置旋转 135 度,使其显示滚动节点的原始旋转。
挤压和拉伸
以下特性控制挤压和拉伸解算器压缩和伸展角色肢体的方式。请参见使用挤压和拉伸。
HIKSnSScaleSpineChildren
如果角色化,则应用于 LeftCollarNodeId,否则应用于 LeftShoulderNodeId
RightCollarNodeId(如果角色化)或 RightShoulderNodeId(如果未角色化)
请注意,即使 HIKSnSScaleSpine 特性设置为正值,这些节点的比例也从不更改。始终通过平移节点实现脊椎子节点的压缩和伸展,而不是通过对它们进行缩放。
肩部控件
HIKRealisticShoulder
确定从肩部提取的并应用于锁骨骨骼(LeftCollarNodeId 和 RightCollarNodeId 节点)的肩部(LeftShoulderNodeId 和 RightShoulderNodeId 节点)所应用的旋转百分比,以模拟手臂抬起时人类肩部的行为。
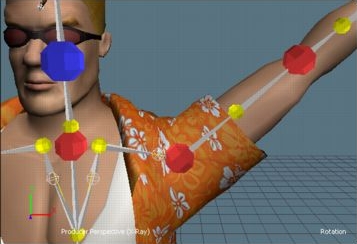
|
例如,在左图中,在未激活 HIKRealisticShoulder 特性的情况下角色抬起左臂。由此产生的姿势创建了不可能的肩部外形。 |
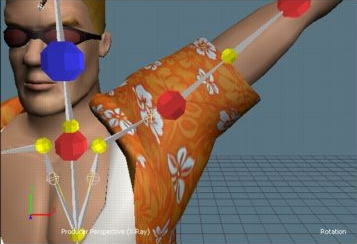
|
在该图像中,HIKRealisticShoulder 特性已激活,并且其值设置为 1.0。手臂旋转时,100% 的旋转将传递回锁骨骨骼,使模型的肩部向上移动。 |
HIKExtraCollarRatioId
如果角色的骨架中具有附加锁骨骨骼(分别由 LeftCollarExtraNodeId 和 RightCollarExtraNodeId 节点定义),则该特性控制 HumanIK 如何在这些锁骨节点中扩散旋转和平移。
较低的值会导致移动移向基础锁骨骨骼(LeftCollarNodeId 和 RightCollarNodeId 节点);较高的值会导致移动逐渐移向附加锁骨骨骼。
髋部控件
HIKHipsTranslationModeId
如果角色指定用于保持髋部平移的特殊节点(HipsTranslationId 节点),则该特性确定应用于角色髋部(LeftHipNodeId 和 RightHipNodeId 节点)的旋转是否也应用于该特殊平移节点。
HIKCtrlEnforceGravityId
确定 HumanIK 反向运动学解算器尝试将角色的重心(即髋部)在角色双脚之间保持平衡的程度。
较高的值会约束髋部的移动,使它们保持在角色双脚的位置之间。较低的值允许髋部自由移动到任何位置,无论双脚的位置如何;这可能会使角色处于一种真人会因重力而失去平衡的姿势。
仅当由 HIKCtrlResistHipsPositionId 特性设置的髋部平移的阻力值大于零时,才使用该特性。
髋部和胸部效应器偏移
以下特性控制应用于角色髋部和胸部效应器的偏移。请参见将关节映射到 HumanIK 节点和效应器。
HIKHipsTOffsetXId
默认情况下,角色处于其默认 T 形站姿时,HipsEffectorId 会控制位于 LeftHipNodeId 和 RightHipNodeId 位置中间的骨架上的假想点。该参数沿 X 轴将偏移应用于该假想点。
HIKHipsTOffsetYId
默认情况下,角色处于其默认 T 形站姿时,HipsEffectorId 会控制位于 LeftHipNodeId 和 RightHipNodeId 位置中间的骨架上的假想点。该参数沿 Y 轴将偏移应用于该假想点。
HIKHipsTOffsetZId
默认情况下,角色处于其默认 T 形站姿时,HipsEffectorId 会控制位于 LeftHipNodeId 和 RightHipNodeId 位置中间的骨架上的假想点。该参数沿 Z 轴将偏移应用于该假想点。
HIKChestTOffsetXId
默认情况下,角色处于其默认 T 形站姿时,ChestEndEffectorId 会控制位于 LeftShoulderNodeId 和 RightShoulderNodeId 位置中间的骨架上的假想点。该参数沿 X 轴将偏移应用于该假想点。
重定目标时,仅当将目标角色的 HIKReachActorChestId 特性设置为非零值时,才使用该偏移。
HIKChestTOffsetYId
默认情况下,角色处于其默认 T 形站姿时,ChestEndEffectorId 会控制位于 LeftShoulderNodeId 和 RightShoulderNodeId 位置中间的骨架上的假想点。该参数沿 Y 轴将偏移应用于该假想点。
重定目标时,仅当将目标角色的 HIKReachActorChestId 特性设置为非零值时,才使用该偏移。
HIKChestTOffsetZId
默认情况下,角色处于其默认 T 形站姿时,ChestEndEffectorId 会控制位于 LeftShoulderNodeId 和 RightShoulderNodeId 位置中间的骨架上的假想点。该参数沿 Z 轴将偏移应用于该假想点。
重定目标时,仅当将目标角色的 HIKReachActorChestId 特性设置为非零值时,才使用该偏移。源角色和目标角色的肩部不匹配时,它会影响肩部的质心,并用于更真实的重定目标。
 除非另有说明,否则此作品受到 Creative Commons 署名-非商业性使用-相同方式共享 3.0 未本地化版本许可证的制约。请参见 Autodesk Creative Commons 常见问题(英文)以获取更多信息。
除非另有说明,否则此作品受到 Creative Commons 署名-非商业性使用-相同方式共享 3.0 未本地化版本许可证的制约。请参见 Autodesk Creative Commons 常见问题(英文)以获取更多信息。