请记住,仅当节点处于连接状态时,载荷才能从一个单元传递到相邻单元。通常,由于网格是连续的,因此一个部件中的单元会直接通过节点连接。
模型中不同部件的连接方式取决于浏览器(树视图)中的“接触”标题。如果不同部件的两个表面发生接触,则它们会基于默认接触类型连接在一起,除非创建了特定的接触对并将其定义为不同的接触类型。有关可用的接触类型和网格要求的说明,请参见接触类型页面。
生成接触对
如果默认接触类型不适合接触对,则需要创建特定的接触对并将其指定给合适的接触类型。
自动接触对
处理 CAD 模型时,可以选择要界面自动创建模型中的所有接触对的列表,还是手动创建接触对。此选项将通过 
 “选项”“CAD 导入”选项卡设置;“整体 CAD 导入选项”按钮,然后相应地设置“自动创建接触对”选项。
“选项”“CAD 导入”选项卡设置;“整体 CAD 导入选项”按钮,然后相应地设置“自动创建接触对”选项。
- “自动创建接触对”已激活。在界面中打开 CAD 模型后,物理接触的表面(零间隙)将在浏览器的“接触”分支中列出。各接触对的接触类型为“默认”以使它们符合“接触(默认:)”的设置。若要设置在特定表面之间使用的某些接触参数,请在浏览器中选择接触对,单击鼠标右键,然后选择新的接触类型。
- “自动创建接触对”未激活。在界面中打开 CAD 模型后,不会消耗检测所有物理接触的表面所需的时间。可以手动选择要接触的部件或表面,如下所述。
添加其他接触对
无论接触对是否为自动创建的,都可以创建其他接触对。如果用户希望两个部件接触(而不是部件上的各个表面接触),或两个表面最初未接触,或由于原始条目已被删除,则可能需要此项。此外,必须手动指定手动创建的模型中的接触对。
有两种方法可用于创建其他接触对:
- 一次创建一个接触对。此方法适用于 CAD 模型和手动创建的模型。首先,在浏览器中选择两个表面、两个部件或一个表面和一个部件。选定后,在其中一个表面或部件的标题上单击鼠标右键,然后选择“接触”命令。选择适合此接触对的接触类型。此时将在浏览器中的“接触”标题下为此接触对创建新标题。或者,可以在显示区域中选择部件和表面,然后单击鼠标右键并选择“接触”。通常,表面的选择顺序无关紧要,重要的是控制浏览器中的列表顺序。对于非线性分析中的面对面接触,如果将“接触类型”定义为“点对面”,则顺序可能很重要。所选的第一个部件或表面将成为主接触面,而第二个选择将成为次接触面。有关“接触类型”的详细信息,请参见面对面接触选项页面。
- 一次创建多个接触对。此方法仅适用于 CAD 模型。首先,在浏览器或显示区域中选择两个或多个部件。然后,单击鼠标右键并选择“接触” “在部件之间创建接触”。选定部件之间接触的所有表面对均将在浏览器的“接触”分支中列出。然后,可以单独更改每个接触对的接触类型,方法是在浏览器中的条目上单击鼠标右键。
不允许同一部件的不同表面之间发生接触,非线性应力面对面接触除外。(使用“接触”树可以在单个部件中创建接触条目,但处理器不会对其进行处理。)
排序接触对
将接触对添加到模型后,它们会以创建的顺序列在浏览器的“接触”分支底部。再次打开模型时,将对接触对进行排序。有三种不同类型的接触条目:
- 部件 A 表面 B 与部件 C 表面 D(在浏览器中为 A/B 与 C/D)
- 部件 A 与部件 C 表面 D(A 与 C/D)
- 部件 A 与部件 C(A 与 C)
接触对的颜色
自动创建的接触对(或低于版本 23 时)在浏览器中使用黑色文本显示。用户显式创建的接触对在浏览器中使用蓝色文本显示。
“外观”“视觉样式”“边”或“视图”“外观”“视觉样式”“网格”。如果模型的颜色使得用户难以看到亮显内容,请使用“视图”“外观”“着色依据”“部件”或“视图”“外观”“着色依据”“表面”来更改显示。此外,还可以通过 “选项”对话框的“设置”选项卡设置亮显颜色。 假设三个不同的部件之间具有表面接触,这些部件的材料将在此处产生不同的静摩擦系数。用户必须创建两个接触对,并为每个接触对指定静摩擦系数。无法将默认接触类型设置为“表面”并设置两个不同的摩擦系数。
再举一例,假设模型中彼此交互的两个不同部件中有 50 个表面。如果不同的接触对具有不同的接触类型,则选择条目并更改每对的接触类型可能是最佳方法。但是,如果只有两对表面接触,而其他 48 对表面被视为粘合,则应将整个模型的默认设置设置为“粘合”。之后,选定其他两个表面并设置为“表面”接触。重点是尽可能减少必须定义的接触对数。指定模型中最普遍的默认接触类型。
接触的顺序会影响模型
如果创建了完全相同的接触对(即,复制接触对),则将仅使用浏览器中的第一个条目。后续条目将被忽略。如果在同一面上定义部件到部件和部件/表面条目,则部件/表面条目将控制该接触对的接触类型,其他接触的表面将遵循该部件设置。有关示例,请参见图 1。
 |
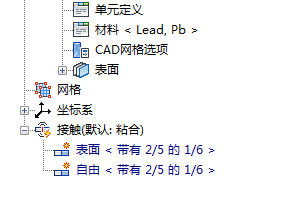 |
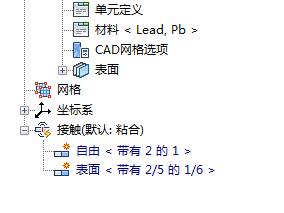
| (a) 定义了相同的部件/表面接触。由于首先列出的是自由接触,因此其为采用的结果。 | (b) 定义了相同的部件/表面接触。由于首先列出的是表面接触,因此其为采用的结果。 |
 |
 |
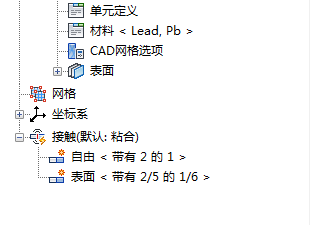
| (c) 部件 1 表面 6 和部件 2 表面 5(1/6 与 2/5)之间的接触是更详细的较小区域,因此该面将采用表面接触。部件 1 和 2(1 与 2)之间的所有其他接触将采用自由接触。 |
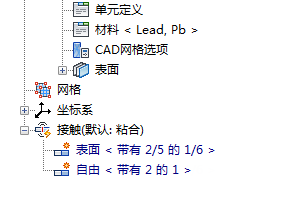
(d) 与示例 (c) 中的接触对相同,但顺序相反。由于这两个条目不完全相同,因此结果与 (c) 相同:部件 1 表面 6 与部件 2 表面 5 之间采用表面接触,部件 1 和 2 之间的所有其他面接触均采用自由接触。 |