FEA 编辑器始终在不同部件之间的边界处保持单独的顶点(重复顶点),即,同一坐标存在两个或多个顶点:每个部件一个顶点。接触类型决定了:
- 单独的顶点创建一个由部件共享的节点(粘合接触),
- 创建两个单独的节点,但不将它们连接在一起(自由接触),还是
- 创建两个单独的节点并使用自动生成的单元将它们连接在一起(表面接触)。
顶点合并操作在执行“检查模型”操作时或在求解阶段(“运行仿真”)开始时执行。根据分析类型、单元类型和接触类型,可能需要在接触部件之间匹配网格。
接触的网格要求
下表说明了装配件内的相邻部件是否需要使用零间隙拟合建模,或各种分析和接触类型是否允许部件之间存在初始间隙或干涉:
| 分析类别 | 表面之间是否允许初始间隙或干涉? |
|---|---|
| 线性 | 否。必须为零间隙、零干涉(“自由”接触除外)。 |
| 非线性 |
是,适用于“表面”和“自由”接触。 否,适用于其他类型的接触。 |
| 热 | 否。必须为零间隙、零干涉(“自由”接触除外)。 |
| 静电 | 否。必须为零间隙、零干涉(“自由”接触除外)。 |
下表说明了是否需要为不同类型的分析和接触在相邻部件之间匹配网格:
| 接触类型 | ||||||
|---|---|---|---|---|---|---|
| 分析类型 | 粘合 | 焊接 | 自由/无接触 | 表面接触(请参见注释 4) | 边接触 | 热压配合接触 |
| 线性、静态应力 | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 匹配 | 匹配 | 匹配(请参见注释 5) |
| 线性、固有频率(模态)和载荷刚化固有频率(模态) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 仅限“滑动/无分离”(匹配) | 不适用 | 不适用 |
| 线性、临界屈曲载荷和瞬态应力(直接积分) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 仅限“滑动/无分离”(匹配) | 不适用 | 不适用 |
| 线性、其他 | 匹配或不匹配(请参见注释 2) | 匹配或不匹配(请参见注释 2) | 匹配或不匹配 | 仅限“滑动/无分离”(匹配) | 不适用 | 不适用 |
| 非线性 | 匹配或不匹配(请参见注释 3) | 匹配 | 匹配或不匹配 | 匹配或不匹配 | 不适用 | 不适用 |
| 热 | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 匹配 | 不适用 | 不适用 |
| 静电 | 匹配或不匹配(请参见注释 1) | 匹配或不匹配(请参见注释 1) | 匹配或不匹配 | 不适用 | 不适用 | 不适用 |
注释 1:如果使用智能粘合,可以匹配网格,也可以不匹配。如果不使用智能粘合,必须匹配网格才能粘合。智能粘合在以下对话框下设置。有关智能粘合(包括对单元类型的限制)的详细信息,请参见引用的页面。
- 线性静态应力:“设置”
 “模型设置”“参数”“接触”选项卡 “启用智能粘合/焊接接触”。请参见页面“分析参数” :线性材料模型静态应力。
“模型设置”“参数”“接触”选项卡 “启用智能粘合/焊接接触”。请参见页面“分析参数” :线性材料模型静态应力。 - 线性模态:“设置”“模型设置”“参数”“接触”选项卡 “启用智能粘合/焊接接触”。请参见分析参数: 固有频率 - 模态页面。
- 载荷加压线性模态:“设置”“模型设置”“参数”“接触”选项卡 “启用智能粘合/焊接接触”。请参见分析参数: 固有频率 - 载荷加压模态页面。
- 线性临界屈曲:“设置”“模型设置”“参数”“接触”选项卡 “启用智能粘合/焊接接触”。请参见分析参数: 临界屈曲载荷页面。
- 线性瞬态应力:“设置”“模型设置”“参数”“接触”选项卡 “启用智能粘合/焊接接触”。请参见分析参数: 瞬态应力 - 直接积分页面。
- 热/热传递:“设置”“模型设置”“参数”“接触”选项卡 “启用智能粘合/焊接接触”。请参见分析参数: 稳态热传递或瞬态热传递页面。
- 静电:“设置”“模型设置”“参数”“接触”选项卡 “启用智能粘合/焊接接触”。请参见分析参数: 静电流和电压或静电场强度和电压页面。
注释 2:以下分析类型使用来自模态分析的结果。因此,这些分析可以利用智能粘合(请参见注释 1),而无需任何其他接触设置:
- 响应谱
- 随机振动
- 频率响应
- 瞬态应力(模态叠加)
- DDAM。
注释 3:如果使用固联表面接触执行粘合(在这种情况下,接触类型为“表面”),则可以不匹配网格。如果不使用固联表面接触,则必须匹配网格且接触类型为“粘合”。在“设置”下为接触对设置固联表面接触。有关固联接触的详细信息,请参见面面接触选项页面。
注释 4:对于线性分析,“表面接触”列提供了三种可用接触类型,即“表面”、“滑动/无分离”和“分离/无滑动”,而且所有这些类型均可从浏览器中选择。仅第一个类型(“表面”)适用于热分析。“热表面”接触也可以包括热阻,这会导致在热量流动时接触表面之间产生温差。非线性分析的表面接触类型和选项的设置方式有所不同。有关详细信息,请参见面面接触页面和选项子页面。
注释 5:“热压配合接触”列提供了两种可用接触类型,即“热压配合/滑动”和“热压配合/无滑动”。部件之间的干涉量可采用 CAD 几何体表示(通过重叠部件)。将模型导入 Simulation Mechanical 中后,表面会匹配(零干涉、零间隙),即,从几何体中删除干涉并在部件之间匹配网格。然而,数字格式的干涉量仍会保留。有关更多说明,请参见下面的热压配合/滑动和热压配合/无滑动部分。
- CAD 模型中的小间隙可在网格划分期间通过使用网格匹配容差删除。间隙必须删除掉才能匹配节点。请参见模型网格设置:模型页面上的网格匹配一段。
- 如果部件之间的间隙对于分析十分关键(即,不希望删除间隙),请使用手动创建的间隙单元(线性静态应力)或面面接触(机械运动仿真)。
- CAD 装配件的部件之间的干涉将在 CAD 数据导入过程中删除。但是,干涉会以数字形式记录下来,如上面注释 5 中所述。
树视图中的顶层“接触(默认: __)”设置指定的接触类型将应用于任意两个表面,且不会单独列出,或者虽然单独列出但设置为“默认”接触类型。例如,如果可以假定装配件的所有部件彼此都完全连接起来,即能够在它们的接口处传递所有类型的载荷,则可保留“粘合”这一默认接触设置。
下面几部分介绍了每个可用的接触类型。
默认
如果为接触条目选定了“默认”命令,则接触类型将沿用全局“接触(默认: __)”设置。对于现有接触对,只能在树视图中选择“默认”,但创建接触对时无法选择此类型。
粘合
粘合接触适用于所有单元类型。粘合后,两个表面在整个分析过程中都将完全接触,且载荷会从一个部件传递到相邻部件。在应力分析中,当一个表面上的节点发生变形时,相连表面上的节点也将以相同的量和方向发生变形。在热传递分析中,每个部件在连接处都具有相同的温度,以此类推。
智能粘合是一种即使网格不匹配也会连接相邻部件上的节点的方法。(请参见表 1 的注释启用智能粘合以及了解有关单元类型和分析类型的限制。)由于节点可能无法排成直线,因此需要容差才能将来自部件 A 表面 B 的网格与来自部件 C 表面 D 的网格匹配起来。使用智能粘合时,请右键单击树视图中的一个接触对并选择“设置”,然后访问容差。“容差类型”的两个选项如下所示:
- “网格大小的分数”使用“值”字段中的输入乘以网格大小以创建尺寸。在一个表面的此距离内的另一个表面上的节点将被粘合。(网格大小基于节点位置的平均单元大小。)
- “绝对大小”使用“值”字段中的尺寸将节点匹配到相连表面。
当接触类型定义为带部件 C 的部件 A 或带部件 C 表面 D 的部件 A 时,位于部件 C 表面 D 的容差内的部件 A 上的所有节点将通过智能粘合来粘合。这可能会影响您要使用的尺寸容差。(从技术上讲,软件会确定将哪些表面粘合到相邻的表面上。它不依赖于树视图中显示的条目顺序。)
智能粘合功能
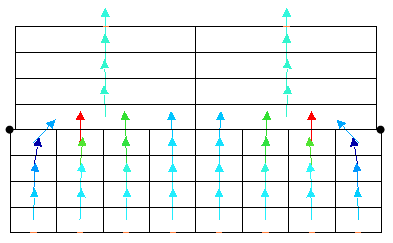
智能粘合将载荷从一个部件上的节点传输到另一个部件上的相邻节点,方法是通过使用方程将部件的自由度(对于应力分析为位移,对于热传递为温度)关联到一起。这可通过与多点约束相同的方法完成。(有关用户定义的多点约束的详细信息,请参见多点约束页面。)在应力分析中,将为块体和二维单元连接平动。对于板对板单元,将连接平动和转动。有关示例,请参见图 1。
由于表面 D 上的节点可能会被连接到表面 D 区域外的表面 B 上的节点,因此智能粘合可在比实际接触区域更大的区域上将载荷从部件 C 分配到部件 A。当然,载荷的扩散度数取决于网格大小。请参见图 1(a)。
|
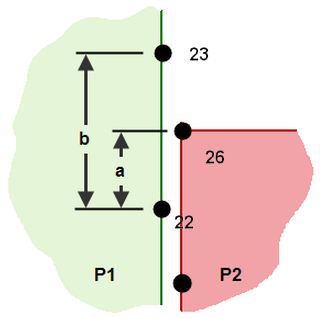
TX26 = TX22 + (a/b)(TX23-TX22) TY26 = TY22 + (a/b)(TY23-TY22) TZ26 = TZ22 + (a/b)(TZ23-TZ22) T 为指定节点处的 X、Y 或 Z 方向的平动。 |
|
(a) 实体 (P1) 对实体 (P2) 连接,采用智能粘合,应力分析。 由于部件 2 在节点 22 和 23 处连接到部件 1,将在大于部件 1 和 2 之间接触面的区域上传递载荷。此近似值更精确,因为部件 1 上的网格尺寸减小。 |
|
|
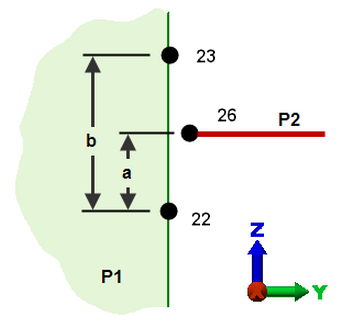
TY26 = TY22 + (a/b)(TY23-TY22) TZ26 = TZ22 + (a/b)(TZ23-TZ22) RX26= 0 R 为指定节点处的 X、Y 或 Z 方向的转动。 |
|
(b) 板 (P2) 对实体 (P1) 连接,采用智能粘合,应力分析。 (为了简单明了,考虑使用二维视图) |
|
|
|
T26 = T22 + (a/b)(T23-T22) T 为指定节点处的温度。 |
| (c) 实体对实体连接,采用智能粘合,热传递分析。 | |
| 图 1:智能粘合示例 | |
智能粘合提示
使用智能粘合将部件 A(需要更精确结果的部件)上的中节点与部件 B(无中节点,无需高精度的部件)上的角节点连接。
|
|
| 未使用智能粘合的情况下,右侧部件中的中节点能够脱离左侧部件的面。(为清晰起见,仅显示了接触面上的节点。) | 使用智能念合,中节点被粘合到左侧部件的面上。因此,中节点无法脱离。(为清晰起见,显示的部件具有微小的间隙。) |
| 图 2:粘合中节点 | |
智能粘合注释
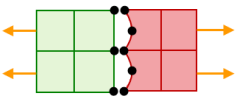
在引入智能粘合之前创建的模型可能依赖不匹配的网格创建自由表面,即使接触类型设置为粘合。如果重新分析此类模型,则不得启用智能粘合;否则,此类表面此时将相当于已粘合。请参见图 3。(默认情况下,将为旧版模型禁用智能粘合。)
|
(a) 在智能粘合之前,由于节点不匹配,部件未粘合。(实际上,任何类型的接触都不起作用,因为节点不匹配。)切向力 F 使部件能够分离。 |
|
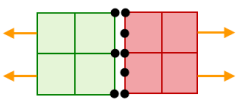
(b) 如果在具有智能粘合功能的软件中打开相同模型,且如果接触类型为粘合并启用智能粘合,则即使节点不匹配也将粘合部件。因此,部件不会分离。避免出现此问题,禁用“启用智能粘合/焊接接触”选项,或将相应表面的接触类型设置为“自由/无接触”。 |
| 图 3:具有不匹配网格的自由接触(旧版模型) |
点焊是其中某些节点不匹配且您不想粘合这些节点的全等表面的示例。
智能粘合:
上述讨论(图 1)暗示部件 2 上的节点连接到部件 1 上的节点。您不具有此级别的控制。相反,您可以指定具有粗网格的表面上的节点是否连接到另一侧,反之亦然。此选择通过“设置”“模型设置”“参数”对话框执行。在用户选择之外,软件会决定哪个表面为细网格,哪个为粗网格。请注意,需考虑接触表面上的所有单元;一部分接触表面的网格大小不是粗细的决定因素。仅使用位于相对表面的容差(见上文)内的节点;接触区域外的节点不用于确定粗细。例如,如果您在部件 1 和 4 之间定义一个接触对,则将计数在部件 1 和 4 之间接触的所有节点,而无论是在一个面还是多个面接触;具有更少接触节点的部件成为粗网格。(默认接触设置也是如此;两个部件之间的所有接触节点均用于确定网格为细还是粗。)对于定义部件/表面和部件/表面之间的接触的接触对,使用在指定表面上接触的节点确定网格是细还是粗。
选择所使用的智能粘合类型(“粗粘合到细网格”或“细粘合到粗网格”)时,考虑两个部件之间应该发生的情况很有帮助。如图 4 至 7 中所示。
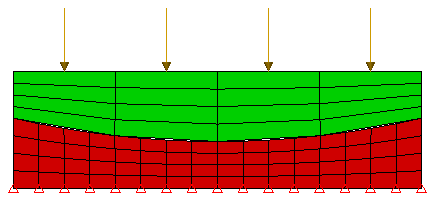
对于接触面遇到纯压缩的应力分析,接触面上的所有节点均应发生相同的量变形。因此,选择“细粘合到粗网格”将提供更精确的结果。请参见图 4。
|
(a) 模型。简单的压缩模型。 |
|
(b) 不正确。当使用“粗粘合到细网格”智能粘合时,仅强制粗网格上的节点遵循细网格的位移。因此,细网格上的内部节点可自由独立移动。如该放大的位移图中所示,细网格位移错误。 |
|
(c) 正确。当使用“细粘合到粗网格”智能粘合时,将强制细网格上的节点遵循粗网格的位移。这两个网格均根据需要变形(尽管强制细网格在粗单元节点之间的节点上线性位移。这可能会导致某些误差)。此处显示了 (b) 中使用的相同的放大位移比例。 |
| 图 4:纯压缩下的应力分析 |
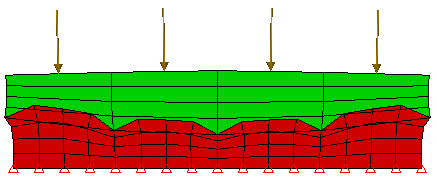
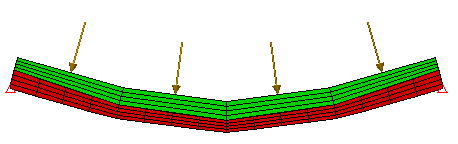
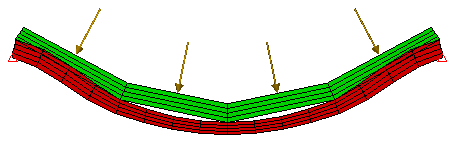
对于接触面遇到弯曲的应力分析,必须允许更精细网格表面上的节点独立于较粗网格上的节点移动;即,两组节点应位移以便创建相同的曲率半径。因此,选择“粗粘合到细网格”将提供更精确的结果。请参见图 5。
|
(a) 模型。简单的弯曲模型。 |
|
(b) 不正确。当使用“细粘合到粗网格”智能粘合时,将强制细网格上的节点遵循粗网格的位移。通过强制细网格弯曲成粗网格产生的相同曲率,位移结果会不太精确。由于底部部件中的每组 4 个单元扭结或斜率突然改变,应力结果尤其会表现出较高的应力。此处显示了 (c) 中使用的相同的放大位移比例,因此此变形明显更小。 |
|
(c) 正确。当使用“粗粘合到细网格”智能粘合时,仅强制粗网格上的节点遵循细网格的位移。因此,细网格上的内部节点可自由独立移动。尽管由于底部部件从顶部部件分离(此处进行了很大程度地放大以更好地显示形状)而使底部部件的位移可能看起来不正确,但两个部件遵循适当曲率的情况表明这些结果更加精确。 |
| 图 5:纯弯曲下的应力分析 |
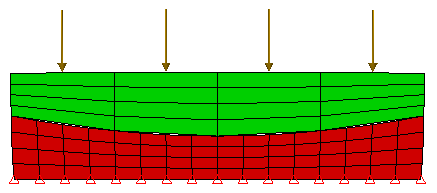
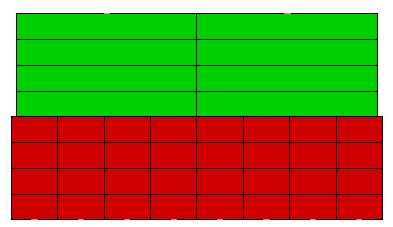
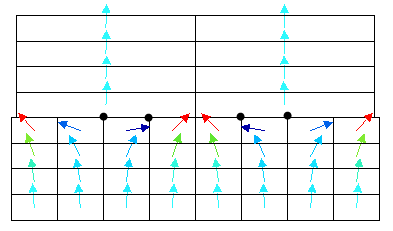
在热传递分析中,热量应持续从细网格流入粗网格。因此,选择“细粘合到粗网格”将提供更精确的结果。请参见图 6。类似的原理适用于静电分析。
|
(a) 模型。一个简单的两部分模型,底部表面暴露于热环境,顶部表面暴露于冷环境。因为这两个部件具有几乎相同的宽度,此二维模型表示一维热传递。 |
|
(b) 不正确。当使用“粗粘合到细网格”智能粘合时,仅强制粗网格上的节点遵循细网格的温度。因此,细网格上的内部节点(显示为圆点)未连接至顶部部件。这些会对热流形成堵塞(如每个单元中间的箭头所示)。热流必须从堵塞的节点侧面流至顶部部件;这会形成不太精确的温度曲线。 |
|
(c) 正确。当使用“细粘合到粗网格”智能粘合时,将强制细网格上的节点遵循粗网格的温度。因此,只有两个外部节点(显示为圆点)未连接至顶部部件。在热流量堵塞降低的情况下,热流量矢量更接近平行(因为它们应用于一维热传递)。因此,会提供更精确的温度曲线。 |
|
图 6:热传递分析 |
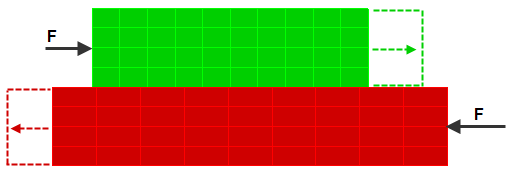
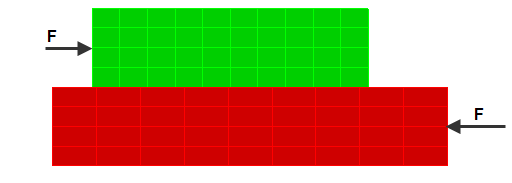
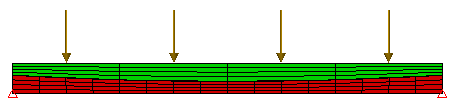
选择智能粘合类型的另一个考虑因素是所选表面上需要存在与相对的表面实际相匹配的节点。请参见图 7。
|
“粗粘合到细网格”智能粘合与“细粘合到粗网格”智能粘合。如果通过选择“粗粘合到细网格”仅将粗(底部,红色)部件上的节点粘合到细(顶部,绿色)部件上,则将仅粘合一个节点(右侧的节点)。由于粗网格上的节点不会接触到另一个部件,因此不会粘合其他节点。如果这是应力分析,则顶部部件可能不具备静态稳定性。要使此示例获得预期效果,更好的选择是“细粘合到粗网格”智能粘合。由于顶部部件上的所有节点都接触底部部件,因此它们将全部将粘合到底部部件上的节点上。 |
| 图 7:粘合显著不同的网格尺寸 |
请记住,智能粘合近似于在两个部件的边界传递载荷。在应力分析中,会保持位移的连续性。其他量(如力、应力、位移的导数)不是连续的。因此,进行智能粘合的边界处的结果可能不精确,具体取决于相对网格密度。然而,相对于智能粘合产生的效果(若有),远离边界的结果应该是精确的。如果部件间的边界处需要精确的结果,则不应使用智能粘合;而是应匹配网格。
智能粘合的一个优点是执行假设分析并更改一个部件上的网格,而无需对整个模型重新执行网格划分。智能粘合将保持接触面处的连接,即使网格可能未对齐。请参见图 8。
|
|
图 8:智能粘合的使用示例。 通过更改部件 2 [P2] 上的网格可以执行网格敏感度分析,而无需对整个模型重新执行网格划分。部件 2 的几何体也可更改,如比较倒角与较大半径圆角与较小半径圆角。 |
使用罚函数方法为使用智能粘合创建的方程求解。将刚度应用于 MPC 方程,并将此刚度添加到法向刚度矩阵中。罚函数方程的刚度取决于所选择的“求解方法”(请参见多点约束)。对于“罚函数方法”,要在“罚函数乘子”字段中输入刚度。乘子为 0 表示部件未连接,乘子无限大表示部件之间完美粘合。遗憾的是,无限刚度在数值求解中不可接受,也不是必需的。通常,与 1E4 到 1E6 相似的罚函数乘子可提供满意的求解。但是,某些分析可能会产生最大至最小刚度警告(最大/最小刚度)或在罚函数乘子过大时无法找到求解。
为判断求解的精度,总结文件包括一个带满意度因子的行。值 100% 表示 MPC 方程(如图 1 中)完全令人满意。任何小于 100% 的值都表示部件存在某些分离。无法确定 X% 表示求解是错误的。根据经验来判断满意度何时表示不可接受的结果。
焊接
焊接接触仅适用于块体和三维单元类型。如果选中“焊接”命令,则沿接触面边缘的节点的行为与选中“粘合”命令时的行为相同。沿这些表面内部的节点的行为与选中“自由/无接触”命令时的行为相同。
自由/无接触
“自由/无接触”适用于所有单元类型。如果选中“自由/无接触”命令,则即使网格匹配,此接触对中的两个表面上的节点也不会收拢到一个节点。在 CAD 模型中,网格生成器不一定会强制网格匹配。这些节点将不会在部件之间传递载荷。在应力分析中,这些节点将相对于其他表面上的节点自由移动。在热传递分析中,将不会在部件之间传导热量,等等。
表面接触
表面接触仅适用于下面所示的单元类型。表面接触可用于 CAD 实体模型、二维创建的网格和手动构建的模型,如下所示。
- 线性静态应力:可指定块体部件之间、块体和板部件之间以及二维部件之间的“表面接触”。仅在部件之间的间隙为零时创建接触。如果是块体到板,则根据块体部件设置接触方向。请参阅下一节了解如何设置接触方向。不支持板部件之间的自动接触。(当然,您可以手动在任何类型的单元之间创建间隙单元。)
如果选中“表面接触”命令,则会在节点之间放置零长度接触单元(类似于用户创建的间隙单元)。这些节点可以自由相对移动,但节点在接触时不能彼此穿过。想象一下在这些表面上的节点之间创建了一条非常短的线。如果该线在分析过程中变长,则它对模型没有任何影响。如果该线变为零长度,它将用作具有将阻碍此运动的刚度值的弹簧。
当使用“表面接触”时,分析将涉及一个迭代过程;因此,运行分析花费的时间比使用粘合接触时要长。此过程可以确定因加载载荷而产生的变形是否会导致这些表面上的每对节点处于接触状态。
注: 有关线性应力分析中的接触单元的其他建模信息,请参见使用间隔单元执行分析。当为表面接触对定义接触单元时,将为每个接触单元计算方向。在树视图中右键单击表面接触对的标题,然后选择“设置”命令以访问“接触选项”对话框,可指定用于计算此方向的方法。可以在“表面接触方向”下拉框中选择方向计算方法。“通过匹配方向计算”的默认选项将根据每个节点处的单元的法向计算方向。这是推荐使用的方法。如果网格为粗网格,则某些单元可能不平坦(即,第四个节点与其他三个节点不共面)。在这种情况下,默认方法可能不会产生有效方向。要获得有效方向,您可以增大“方向容差角”字段中的值。如果其中一个表面不包含平坦的单元,您可通过在“表面接触方向”下拉框中选择“垂直于第一个部件/表面”或“垂直于第二个部件/表面”选项来修正方向计算。您应选择用于包含平坦单元的部件/表面的选项。
如果选中“表面接触”或“边接触”,则可为接触对或默认接触增加摩擦。若要打开摩擦,请右键单击接触对,然后选择“设置”命令。这将打开一个对话框,在该对话框中可以激活“包含摩擦”复选框并定义“静摩擦系数”。线性材料模型静态应力分析中的接触假设通过接触中原始存在的同一组节点传递接触力,且力的方向与原始法向方向相同。即,变形不会更改接触中的点或方向(小变形理论)。
在图 9 中,块位于固定表面上。施加法向力 N 以产生摩擦力 F f 。块和固定表面之间存在静摩擦系数 μ。对块施加侧向力 F。在块和壁面之间放置一个弹簧以形成静态稳定模型。F f 的范围可以是 0 到 μN,如下所示:
对于 F <= μN:
Ff= F
Fs=0
对于 F >= μN:
Ff=0
Fs=F
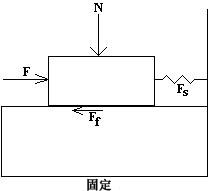
图 9:静摩擦
总之,一旦力超过摩擦力的最大值,摩擦力就会变为零,并不再阻碍运动。如果随后发生的情况非常重要,应执行使用面面接触的机械运动仿真 (MES) 分析。在 MES 中,可以定义动态摩擦系数以计算超过静摩擦力的摩擦力。
- 机械运动仿真和非线性应力:可以使用面面接触指定块体、壳、二维、梁和桁架部件的组合之间的接触。因为此类型的分析会计算大变形,因此部件无需实际接触也可创建自动接触。
在面面接触屏幕中输入模拟运动仿真/非线性静态应力分析的接触参数。分析中可以包含静态和滑动(动态)摩擦。有关详细信息,请参见面面接触页面。
- 热传递分析:可指定块体部件之间、块体和板部件之间、板部件之间以及二维部件之间的表面接触。仅在部件之间的间隙为零时创建自动接触。
热分析中的表面接触会在表面之间创建零厚度二维或三维单元。由于两个部件上的节点未合并到一起,因此跨连接存在温度梯度。
对于热分析,可以为任何表面接触对定义接触热阻。这可用于模拟引起部件之间存在温度梯度的不良接触。也可用于模拟两个部件之间的薄膜。可以右键单击接触对上的标题,然后选择“设置”命令定义热阻。您可以在“热阻:”下拉框中选择“总热阻”或“分布热阻”。如果选中“总热阻”选项,“值:”字段中定义的热阻值将均匀地分布在表面对上。(对于二维平面模型,总热阻是针对配合部件的厚度。对于二维轴对称模型,总热阻是针对 1 弧度)。如果选中“分布热阻”选项,“值:”字段中定义的值将除以接触对的面积,然后应用到模型。
热接触示例
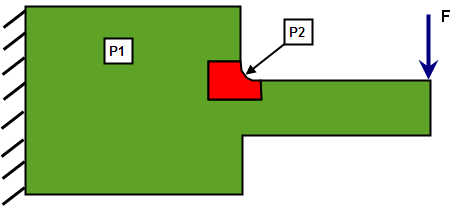
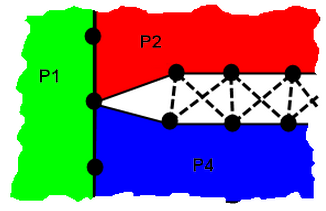
接触单元不是在两个具有表面接触的部件粘合到另一个部件(或多个部件)的边界处创建的。例如,假设部件 2 和 4 被定义为彼此表面接触并被粘合到部件 1。请参见图 10(a)。连接细节表明部件 2 和 4 彼此分离,间隙由 8 节点热接触单元(对于三维模型)或 4 节点热接触单元(对于二维模型)填充。请参见图 10(b)。然而,在部件 2 和 4 粘合到部件 1 的位置处未创建接触单元。
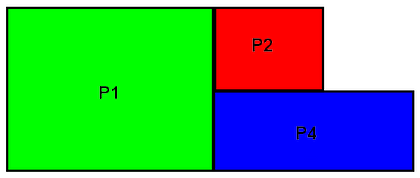
(a) 三个部件模型示例。部件 2 (P2) 和 4 (P4) 具有它们之间定义的表面接触。两者都粘合到部件 1 (P1)。
接触单元

(b) 部件之间接触的详细视图。在每一处都创建了热接触单元,由于粘合,与部件 1 的接触中的单元除外。因此,部件 2 和 4 之间的接触面积小于理想值。(为清晰起见,部件 2 和 4 之间的间隙被放大。在分析中不会创建间隙。)
图 10:热接触示例 提示: 热阻为 0(表示部件之间完全接触)不是很好的选择。热阻为 0 表示传导率为无限大,这会导致数值求解过程中发生不精确性。当存在不精确性时,使用一个较小的非零值模拟此类情况。
滑动/无分离
粘合接触曲表面处于法向方向,同时允许表面相对于彼此朝切向方向滑动。
分离/无滑动
接触表面在法向方向可以部分或完全分离,但不能相对于彼此朝切向方向滑动。
边接触
如果选中“边接触”命令,则沿接触面边缘的节点的行为与选中“表面接触”命令时的行为相同。沿这些表面内部的节点的行为与选中“自由/无接触”命令时的行为相同。
热压配合/滑动
表现像“表面接触”,但接触部件之间存在初始干涉。“接触选项”对话框包括一个“干涉”输入字段,该字段右侧还有一个“自动”复选框。如果是 CAD 模型,且 CAD 装配件中存在几何干涉,则会从几何体中删除干涉,且净配合(零干涉、零间隙)中的网格相互匹配。但是,原始 CAD 装配件中的干涉数将保持不变。您仍需要在 Simulation Mechanical 中定义热压配合接触(假定您要对干涉效果进行量化)。在默认情况下,“自动”干涉选项处于激活状态,而且会自动为每个节点指定干涉数值(也就是说可以不一致)。
如果禁用“自动”选项,或者使用不存在几何干涉的手动构建模型或 CAD 模型,可以在接触部件之间指定统一的 径向 干涉。例如,如果将孔直径为 40 mm 的轴承压到直径为 40.03 mm 的轴上,径向干涉为 0.015 mm [直径干涉的一半,或 (40.03-40)/2]。手动指定干涉可快速确定各种配合强度的影响,而无需修改 CAD 几何体。也可在 CAD 模型或手动构建的模型中未表示干涉的影响时轻松确定其影响。
CAD 装配件建模可以在接触部件之间形成净配合。手工构建的装配件 必须 使用匹配表面(净配合)建模。在任一情况下,都可以在“接触选项”对话框中手动指定统一干涉。此外,还可以使用用户指定的统一干涉值覆盖 CAD 模型中的几何干涉(如果有)。
热压配合/无滑动
表现像“分离/无滑动”接触,但接触部件之间存在初始干涉。配合强度和摩擦力足以防止接触部件之间产生相对运动(滑动)时,使用此选项。径向干涉可以自动指定(基于 CAD),也可以手动指定,方法与选择“热压配合/滑动”接触(见上文)时相同。
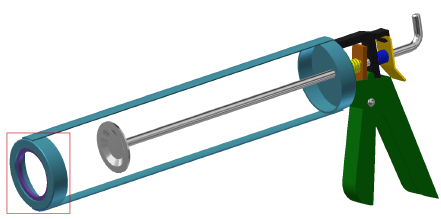
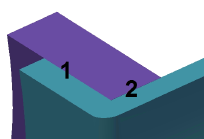
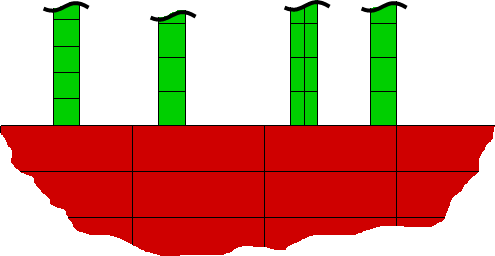
示例
- 接触面 1 的接触类型为“表面接触”。此接触不会约束环朝法向或切向方向移动。
- 接触面 2 的接触类型为“热压配合/无滑动”。此接触具有初始干涉配合,因为环的外径大于枪架的内径。然而,如果热压配合的摩擦力被克服,环仍可朝法向和切向方向自由移动。