使用多个载荷工况运行单个分析
如果使用多个载荷工况,只需设置一次模型,即可获得多个载荷组合的结果。这可通过“分析参数”对话框的“乘子”选项卡(部分)设置。
对模型施加节点或边缘力和节点力矩时,您可以指定放置在“载荷工况/载荷曲线”字段中的载荷工况。节点力不受“分析参数”、“乘子”对话框的影响。
您可以在“分析参数”对话框的“乘子”选项卡中为每个载荷工况的“载荷工况乘子”表创建一行,并将对话框中列出的单元类型载荷乘以输入的值。
- “索引”列将列出每行的载荷工况编号。此条目将会自动生成,用户指定无法指定。
- 在“说明”列中输入每个载荷工况的名称。例如,有用的说明包括“仅固定载荷”、“离心载荷”或“所有载荷相结合”。这些说明将显示在“结果”环境的演示窗口左下角的注释中。此外,它们还将显示在“报告”内的“载荷工况乘子”表中。
- “压力”列将乘以模型中以下所有类型的载荷大小:
- 表面压力/面力
- 表面力
- 表面静水压力
- 梁分布载荷
例如,如果将 100 psi 压力应用于模型表面,并且“分析参数”对话框的“乘子”选项卡中的压力乘子为 1.5,则载荷工况的总压力为 150 psi。您可以只改变由压力乘子控制的载荷大小。不能将载荷的数量、其位置或其方向从一个荷载工况改变为另一个载荷工况。
注: 压力乘子不会影响表面轴承载荷、表面力矩、表面远处受力或表面可变压力载荷。对于这四类载荷,载荷工况编号在应用每个载荷时指定,而不是位于分析参数中。因此,可以在各种载荷工况之间改变此类载荷的数量、其位置、方向和大小。同样,那些应用于节点或边的其他载荷还为应用载荷时指定载荷工况编号提供了灵活性,而不是使用分析参数中的全局乘子。 - “加速度/重力”列将乘以“分析参数”对话框的“加速度/重力”选项卡中的“体积力加速度”字段的大小。此条目不是离心载荷的乘子。
- “Omega”列将乘以在“离心式”选项卡中指定的“角速度(Omega)”值的大小。角速度翻一倍,离心力将翻四倍:F = m*ω2/R。
- “Alpha”列将乘以在“离心式”选项卡中指定的“角加速度(Alpha)”值的大小。
- “位移”列将乘以模型中的任何规定位移大小。
- “热”列将乘以模型上的热载荷,并得出膨胀和/或热应力。热载荷由(热膨胀系数)*(节点温度 - 无应力参考温度)定义。请注意,该方程不用乘子乘以节点温度。如果使用温度相关材料属性,则以指定温度下对材料属性求值;热乘子不会影响材料属性。
- “电”列将乘以模型上的任何电压大小。其中包括在“电”选项卡中指定的“默认节点电压”、从静电结果文件读取的任何电压,以及任何手动应用的“电压”载荷。
执行分析后,为每个指定载荷工况输出一组单独的结果。在“结果”环境中,您可以使用“结果选项” “荷载工况选项”“载荷工况”查看每个载荷工况的结果。
“荷载工况选项”“载荷工况”查看每个载荷工况的结果。
计算反作用力
典型的应力分析计算结果显示作用于有限元的节点位移和应力。有时,您可能想知道模型施加于其他对象的力/力矩有多大。例如,固定在一端并由另一端施加垂直力的悬臂梁产生反作用力/力矩。
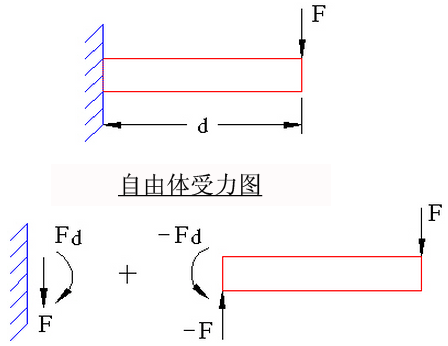
图 1:悬臂梁的自由体示意图
F = 梁施加于墙面的反作用力。
Fd = 梁施加于墙面的反作用力矩。
内部力计算器报告模型中所有节点的反作用力。这可通过激活“分析参数”对话框的“解”选项卡中的“计算反作用力”复选框启用。通常,仅具有特定边界条件的节点才会给出非零反作用力。内部力计算器生成 filename.ro 文件。.ro 文件是一个未格式化的直接访问文件,其中包含节点反作用力、节点指定力以及不同节点的力差。此文件与 .do 文件类似,可用于“结果”环境(当然,载荷工况数是其三倍之多)。反作用力的文本结果将写入 filename.l 文件。
结构分析求解以下方程组:
K D = F (Kij Dj = Fi j sum)
其中
K 是刚度矩阵
D 是节点位移/转动的矢量
F 是外施载荷和边界条件的矢量
A 是装配件运算符
ke 是单元级的刚度矩阵
fe 是单元级的指定力矢量(包括面力、体积力、热载荷等)
![]() 是指定离心力的单元级矢量
是指定离心力的单元级矢量
de 定义为单元位移矢量(即,从矢量 D 获值,对应于单元节点)
Fn 是节点指定力/力矩的矢量
内部力计算器使用以下定义:
R = -KD = 节点反作用力
F = 指定节点力
F - KD = 节点残余力 (R + F)
-ke de = 单元反作用力
fe +![]() = 单元指定力
= 单元指定力
结构分析将离心力作为节点力(而非单元级体积力)计算。边界、间隙和刚性单元没有质量,因此不会产生离心载荷。
若要准确计算反作用力,处理器必须一致;即,内部力处理器和线性应力处理器的单元例程应该相同。异步处理器在不受约束的节点处产生非零残余力。请注意,如果矩形单元产生零残余力,而扭曲单元并非如此,这表示可能存在同步问题。
有时,为了便于计算反作用力,可以忽略某些单元(例如,若要查找附着到边界单元的节点上的反作用力,不应将边界单元刚度组合到 K)。此操作可以通过按下“设置”按钮完成。生成的对话框包含一个表,其中第一列指出部件编号,第二列指出可以添加的说明,第三列(如果单击)提供以下选项:
载荷和单元
- 为此部件中的所有节点和单元输出反作用力。
-
仅单元
仅输出单元的反作用力。 -
忽略
计算反作用力时,忽略此部件的单元和节点。
如果模型中存在边界单元(1D 弹簧、3D 弹簧或规定位移),则必须激活“忽略边界单元组”复选框,才能获取精确的反作用力结果。这将导致处理器不计算边界单元的反作用力,从而抵消附着边界单元的模型节点处的反向反作用力。默认情况下,“忽略边界单元组”选项已激活。
“求解器”选项
在“分析参数”对话框的“解”选项卡的“求解器类型”下拉菜单中,您可选择静态应力分析的求解器类型。另请参见可用的求解器类型,了解背景信息。可用的选项如下所示:
- “自动”:这是默认选项。如果选择,则处理器将根据模型尺寸(即,根据要求解的自由度数)在“迭代(AMG)”和“稀疏"选项之间选择。稀疏求解器通常是中小型模型的最佳求解器。迭代求解器通常是大型模型的最佳求解器,仅需较少的 RAM。
- “稀疏”:使用“稀疏求解器类型”下拉菜单中提供的稀疏求解器之一。稀疏求解器使用多个线程/内核(如果可用)。请参见下面的“‘稀疏求解器’部分”主题。
- “迭代(AMG)”:使用“代数多重栅格”迭代方案求解方程组。此求解器将使用多个线程/内核(如果可用)。对于要求解大量自由度的模型而言,这是默认设置;对于具有薄壁、细长部件、板/壳或梁单元、多点约束 (MPC) 的模型和病态模型,这是建议设置。
- “迭代(AMG-MF)”:这是“迭代(AMG)”求解器的一个变体,根据 Autodesk Moldflow 技术改编而成。它最适合于部件体积相对较厚或较粗的模型,对于此类模型,它比“迭代(AMG)”求解器具有性能优势。必须手动选择此求解器;对于大型模型,“自动”选项仅使用“迭代(AMG)”求解器。“迭代(AMG-MF)”求解器使用多个线程/内核(如可用)。
选择“迭代(AMG-MF)”求解器时,“分析参数”对话框的“解”选项卡中的其他选项可用。特别是,此求解器可以利用 GPU(图形处理单元)计算功能,在这种情况下,GPU 的许多小内核有助于执行计算密集型任务。激活“使用 GPU 版求解器”选项,以充分利用此功能。
如果出于某些原因,您需要在不执行分析的情况下创建刚度矩阵,请激活“刚度计算后停止”复选框。仅当出于其他目的(例如,从其他程序访问)使用刚度矩阵时,这才有用。系统在运行分析时始终计算刚度矩阵,因此正常情况下使用此选项没有益处。
对于稀疏和迭代求解器,“内存分配百分比”字段可控制有多少 RAM 可用于读取单元数据并装配矩阵。建议使用较小的值。(如果值小于或等于 100%,则使用可用的物理内存。如果此输入的值大于 100%,则内存分配将使用可用的物理内存和虚拟内存。)
如上所示,某些求解器可利用计算机上的多个线程/内核。在这些情况下,将启用“线程/内核数”下拉菜单控件。您需要使用所有可用的线程/内核来确保以最快速度求解。但是,如果您需要在分析的同时利用某些计算能力运行其他应用程序,则可能会选择使用较少的线程/内核。
“迭代求解器”部分
如果选中“迭代求解器”,则系统将启用“迭代求解器”部分。此部分的输入如下:
- “收敛容差”字段确定通过方程矩阵所得解的精度。容差越小,解越精确。
- “最大迭代次数”将在此迭代次数内未解出方程矩阵时停止分析。
- 解的精确度取决于收敛容差;容差越小,解越精确,但所需的迭代次数也有可能越多。与所有迭代求解一样,您应检查结果,确认达到所需的精确度。在某些情况下,使用不同的收敛容差执行两次分析,这是确认精确度的最佳方式。
- 对于静态应力分析,需要检查反作用力的精度。摘要文件(可从“报告”环境中的浏览器或通过使用记事本编辑摘要文件进行查看)的末尾包括反作用力和其他参数的摘要。如果存在大量未固定方向残余力,可能表示解的收敛性较差。当然,也可以在“结果”环境中检查残余力(支承反作用力)的总和是否匹配外施载荷。
“稀疏求解器”部分
如果选择“稀疏求解器”,则系统将启用“稀疏求解器”部分。此部分的输入如下:
- “稀疏求解器类型”下拉菜单包含当前可用的稀疏求解器。选项如下所示:
- “默认”:使用 BCSLIB-EXT。
- “BCSLIB-EXT”:使用 Boeing 高级分析引擎稀疏求解器。BCSLIB-EXT 求解器可将临时文件写入环境变量 USERPROFILE 指定的文件夹中。默认情况下,此变量将设置为文件夹 C:\Documents and Settings\Username。其中,C: 是操作系统安装所在的驱动器。如果 BCSLIB-EXT 求解器返回错误编号 -701 或 -804,则意味着硬盘空间因存储临时文件而耗尽。如果出现这种情况,请将 USERPROFILE 变量更改为另一可提供足够硬盘空间的目录。(有关更改环境变量的信息,请参见 Windows 帮助和支持文档。)
- “MUMPS”:(MUltifrontal 大规模并行稀疏直接解算器)注意:从 Simulation Mechanical 2015 版本起,不再支持“MUMPS”求解器。请勿使用此选项。
- “求解器内存分配”字段将为 BCSLIB-EXT 求解器设置稀疏矩阵求解过程中要使用的内存量。通常,如果分配更多的内存,则会加快分析速度。其他稀疏求解器将自动调整内存设置,因此无需进行设置。
“接触”选项
表面接触
如果要执行接触分析,您可在迭代过程中使用三种方法确定互相接触的节点。这可在“分析参数”对话框的“接触”选项卡上的“迭代方法”下拉菜单中指定。“单个点”选项是最保守的方法;该方法可激活/禁用每个点,但是仅当多个点的状态均相同时才同时考虑所有这些点。对于含间隙单元的手动构建模型,建议使用此方法。“混合”选项可同时激活所有处于压缩状态的非活动接触点,但每次只能禁用一个未处于压缩状态的此类点。“多个”选项最强大,因为它可以激活或禁用所有需要更改状态的间隙。最后这一选项可能会导致求解不稳定。但如果稳定,则可生成最有效的解。所有这三种方法均适用于表面和边接触,但建议使用后两种方法。
与接触关联的非线性结构分析将会线性化,分为许多分段线性计算步骤。此过程会继续,直至达到平衡或迭代次数超过在“最大迭代次数”对话框中指定的值为止。
“阈值容差”字段用于防止接触过程中发生不必要的振动行为。绝对应变低于此值(较小)的接触单元不会更改迭代之间的状态。因此,那些状态通过其他方式从已启用更改为已禁用(或反之)的单元,将在此特定迭代过程中保留其当前状态。此条目的典型值通常小于 0.01。
许多接触问题会导致第一次迭代的求解不稳定。此外,如果存在刚体运动,则所有迭代的求解可能均不稳定。当未附着结构时,这完全是因奇异或病态方程组中的基础数学结果所导致的。为了避免此类求解问题,通常采用标准化方法。“标准化方法”下拉菜单中提供了三个不同的选项。所有这些标准化选项均可预激活第一次迭代的所有接触点。“整体/初始”选项在整个模型中使用较小的相同刚度值,且仅在第一次迭代之前应用。因此,它特别适合不展现刚体运动的模型。第一次迭代之前其他两个选项不会应用,但系统将为所有迭代添加模拟约束,以防止刚体运动。这些选项使用人工刚度强制执行此约束。“局部”选项要求您指定一个用于建立此刚度的数字。输入数字是此刚度相对于结构模型中的最大刚度之比。此数字应当介于 0 到 1 之间。您还可选择避免使用标准化方法。
如果选择“局部”选项,则需指定一个用于建立此刚度的值。此操作在“稳定系数”字段中完成。输入数字是此刚度相对于结构模型中的最大刚度之比。此数字应当介于 0 到 1 之间。
如果在达到最大迭代次数时解未收敛,则可按系数 10 缩减接触刚度。执行该操作的次数与在“刚度缩减尝试次数”下拉菜单中指定的值相同。
粘合接触
有两种方法可处理粘合连接。具体使用的方法部分取决于两个部件之间的节点是否匹配。
如果激活“启用智能粘合/焊接接触”选项,则将在必要时使用多点约束 (MPC) 方程来粘合部件 A、表面 B、部件 C 上的最近节点以及表面 D。形状函数会将表面 B 上的节点位移插入表面 D 上的节点。因此,各部件之间的网格无需匹配。无论节点是否匹配,MPC 均可用于表面接触对上的所有节点。如果所有节点上的网格确实匹配,则使用节点匹配粘合接触表面;相连部件上的两个顶点将收拢为一个节点;MPC 方程不用于接触表面。“智能粘合”下拉菜单的选项如下:
- “无”:不使用智能粘合。因此,节点必须匹配才能粘合部件。
- “粗粘合到细网格”:智能粘合将创建 MPC 方程,将较粗网格表面上的节点连接到更精细网格表面上的节点。
- “细粘合到粗网格”:智能粘合将创建 MPC 方程,将更精细网格表面上的节点连接到较粗网格表面上的节点。
“智能粘合”选项适用于粘合接触和焊接接触。其他接触类型(除“自由接触”外)均需节点匹配。有关定义接触的阐述和使用智能粘合的附加信息,请参见接触类型页面。
默认情况下,智能粘合将使用压缩方法对分析求解。如果发现分析未收敛或未按预期执行,则可尝试对 MPC 方程使用不同的“求解方法”(请参见多点约束)。单击“设置”“载荷”“多点约束”,并从“求解方法”选项中选择。如果使用“罚函数方法”,则解的精确度将由“罚函数乘子”字段控制。罚函数求解期间会将罚函数乘子乘以模型中的最大对角线刚度。建议使用 10
4
到 10
6
之间的值。
- 您在“定义多点约束”对话框中选择的求解方法将成为含 MPC 的所有特征将使用的方法。这些特征包括但不限于:循环对称、无摩擦约束、智能粘合和用户定义的 MPC。例如,如果要使用“罚函数方法”对涉及智能粘合的所有分析求解,则可在“定义多点约束”对话框中选择“罚函数方法”,以替代默认的压缩方法。
- 智能粘合适用于块体、二维、膜和板单元之间的接触。涉及其他单元类型的粘合接触需要节点匹配,且不受智能粘合设置的影响。
如果未激活“启用智能粘合/焊接接触”选项,则部件仅在各部件之间的节点匹配时粘合。
控制输出文件中的数据
执行分析之前,您可选择要创建的其他输出。使用“分析参数”对话框的“输出”选项卡,您可控制输出的数据。所有输出将转换为各种文本文件,但以下选项除外:
- “中节点处的应力/应变(二进制)”:如果激活,则中节点处的应力和应变将输出到二进制结果文件。稍后,这些结果将在“结果”环境中显示。(“中节点”是一个选项,您可使用“单元定义”对话框为特定单元类型激活该选项。)