Das inverse Kinematiksystem von CAT – die sog. VK-gesteuerte IK – hat das Ziel, Sie intuitiv mit Ihrem Rig interagieren zu lassen, ohne sich über IK und VK den Kopf zerbrechen zu müssen.
Das System passt die aktuellen VK-Rotationen eines Glieds an das IK-Ziel an. Dieser flexible Ansatz bietet Unterstützung für IK-Ketten, die sich um eine beliebige Achse drehen, nicht ausschließlich um eine, wie es bei anderen IK-Systemen der Fall ist. Außerdem ist es einfach, benutzerdefinierte Komponenten wie z. B. Beschränkungen zu integrieren und so die Funktionsweise des Systems individuell anzupassen.
Konfigurieren der IK-Kette
Zur Konfiguration der Bones in der IK-Kette verschieben und drehen Sie einfach die Bones in die gewünschte Anordnung. Sie können die Bones in beliebiger Richtung drehen.
Aufgrund der Tatsache, dass die IK-Lösung von der VK-Lösung abgeleitet wird, ist es wichtig, im Einrichtungsmodus auf eine möglichst gute Übereinstimmung von VK- und IK-Konfiguration zu achten. Ein guter Trick ist die Verwendung der Schaltfläche "IK und VK zuordnen", bevor Sie mit der Bearbeitung des Glieds in IK beginnen. Bei einer komplexen Gliedstruktur wie der einer Spinne empfiehlt es sich, das Glied in VK zu positionieren und IK erst zu aktivieren, wenn Sie fertig sind.
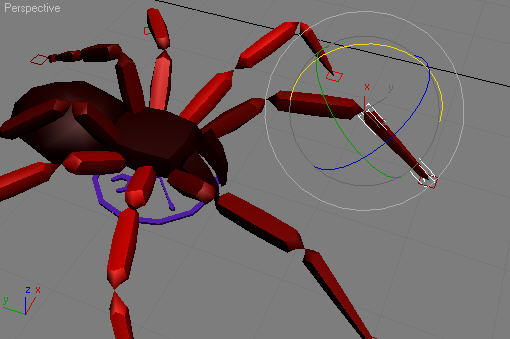
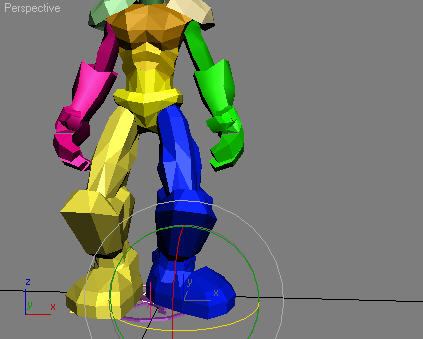
Drehen Sie die Bones bei komplexer Gliedstruktur in VK, damit sie auf der Fußplattform stehen.
Da die Bones eines Glieds um jede Achse drehbar sind, können Sie auch o-beinige IK-Ketten für reitende Cowboys erstellen.
Der Unterschied zwischen der Arbeit in IK und VK
Der Unterschied zwischen IK und VK fällt in CAT gering aus. Glieder reagieren in IK und VK nahezu identisch auf Manipulationen. Der Unterschied besteht darin, dass in IK das untergeordnete Ende eines Glieds (z. B. die Handfläche) stets versucht, dem IK-Ziel zu folgen. In VK unterliegt das Glied nicht dieser Einschränkung.
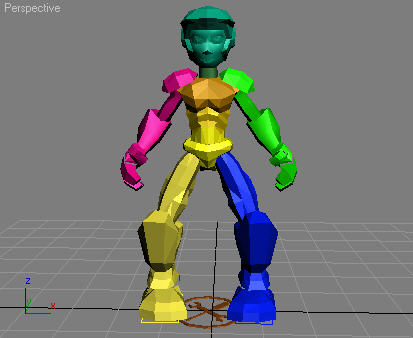
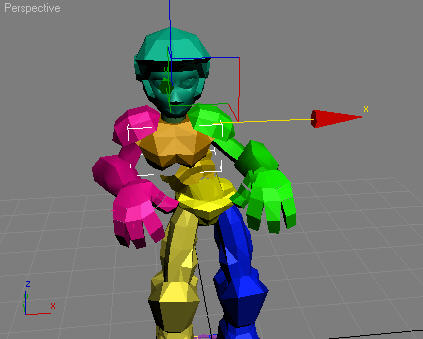
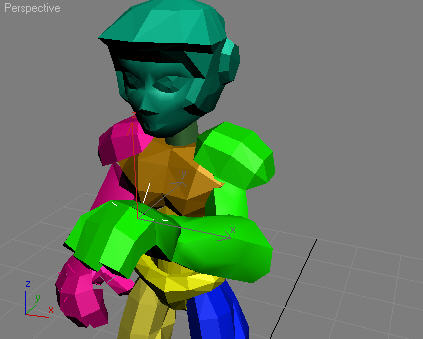
Wenn der Brustkorb von einer Seite auf die andere bewegt wird und die Arme mit VK arbeiten, bewegen sich die Arme einfach zusammen dem Brustkorb.
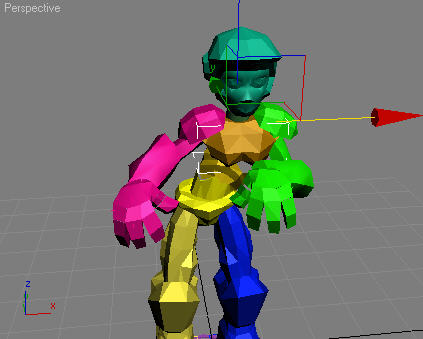
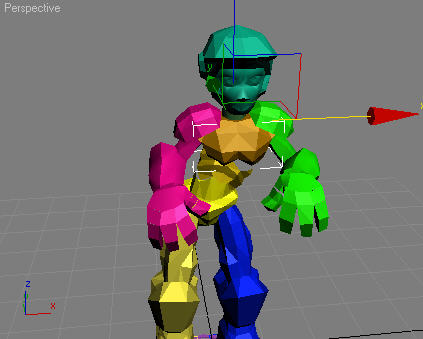
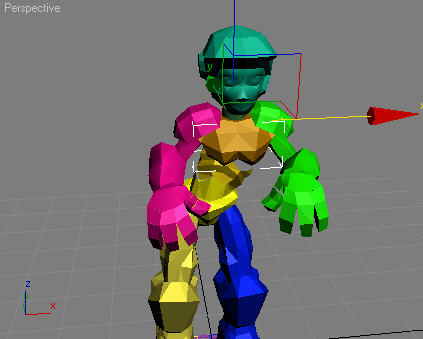
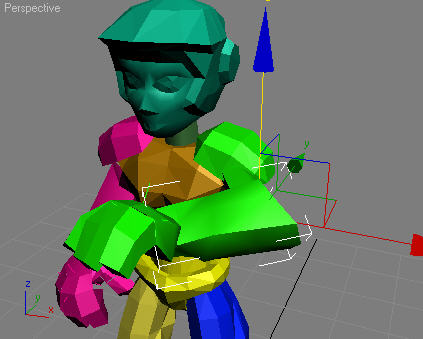
Wenn die Arme dagegen mit IK Arbeiten, bleiben die Hände an Ort und Stelle, während der Brustkorb transformiert wird.
Einsatzmöglichkeiten von IK
Verwenden Sie IK, wenn ein Glied über eine feste Endposition verfügen muss. Das naheliegendste Beispiel ist die Animation von Beinen beim Gehen, bei der die Füße ohne zu gleiten auf dem Boden aufgesetzt werden müssen, während Sie die Bones der Beine drehen. Ein anderes Beispiel sind Arme, die ein anderes Objekt halten, etwa eine Waffe oder ein Lenkrad.
Verhaltensweise des IK-Systems von CAT
Verschieben des IK-Ziels
Wie Sie es auch von anderen IK-Systemen erwarten würden, behält die IK-Kette ihre ursprüngliche Konfiguration möglichst exakt bei, wenn Sie das IK-Ziel verschieben.
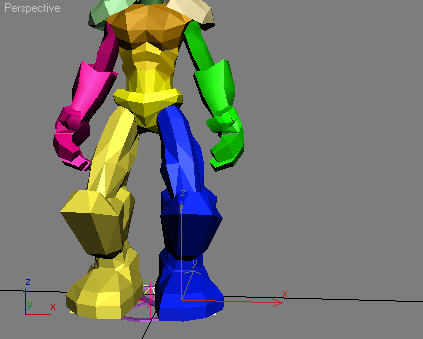
Wenn sich das IK-Ziel des Beins bewegt, erhält das Glied die grundlegende Beinkonfiguration so weit wie möglich aufrecht.
Drehen des IK-Ziels
Möglicherweise überrascht es Sie, dass sich das Glied nicht dreht, wenn das IK-Ziel gedreht wird. Auch wenn dies zunächst ungewöhnlich erscheinen mag, verleiht es dem IK-System von CAT größere Flexibilität und stellt kein Problem dar.
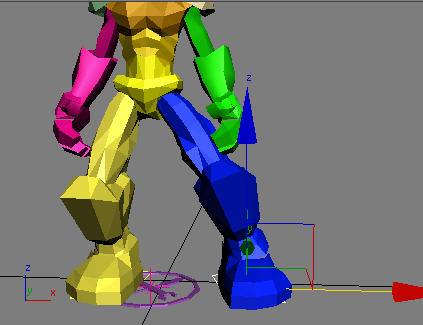
Durch Drehen des IK-Ziels wird nur der Knöchel gedreht. Der Rest des Glieds bleibt unbeeinträchtigt.
Als einfache Abhilfemaßnahme können Sie den Oberschenkel-Bone separat drehen (siehe unten, "Anpassen der Drehung der Glied-Bones beim Animieren"). Eine andere Möglichkeit ist die Beschränkung der Rotationen des Oberschenkels auf die Fußplattform.
Anpassen der Drehung der Glied-Bones beim Animieren
Während Sie das IK-Ziel animieren, möchten Sie vielleicht die genaue Position der Bones der IK-Kette anpassen. Mit CAT können Sie die Bones einfach im Ansichtsfenster wie erforderlich drehen.
Die Hand wurde nach vorne bewegt, aber der Ellbogen ist zu niedrig – wir ziehen ihn daher einfach nach oben.
Ziel ausrichten
Über den Wert "Ziel ausrichten" können Sie steuern, ob die Handfläche die Drehungen des IK-Ziels übernimmt oder nicht.
Wenn der Wert "Ziel ausrichten" auf 0,0 eingestellt ist, bewegt sich die Handfläche zusammen mit dem IK-Ziel, bleibt aber auf den letzten Bone des Glieds ausgerichtet (im Falle eines Menschen auf den Unterarm).