Characterizing Impalas, Gazelles and Other Antelopes
Impalas and gazelles are even-toed ungulates, as are the oryx and the blackbuck, that fall under the general term antelope in common parlance. They are characterized by their agility, flexibility and grace.
This page gives some suggestions for how to characterize an antelope skeleton for use with HumanIK. Note that there are many possible ways to characterize an antelope; the suggestions below may or may not be appropriate for use with your own characters.
Quadrupeds example
To see a working demonstration of the suggestions on this page, run the Quadrupeds example included with the HumanIK SDK. The HIKSamples.sln solution in <HumanIK_installation_folder>/solutions/<platform_and_toolset> integrates the projects and source code for the samples. For details, see HumanIK Samples.
See also the Quadrupeds.fbx file in <HumanIK_installation_folder>/data/molecule/scenes.
Neutral stance
The neutral stance for your character must meet all the requirements for the quadruped neutral stance that are outlined on the Using HumanIK for Quadrupeds page.
Hind legs
Bone mappings
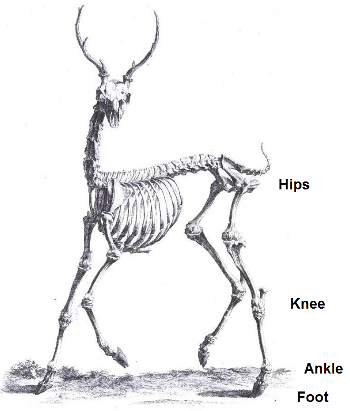
In real life, the impala's knees should not be confused with its talus (ankle bone). However, for the purposes of your HumanIK characterization, you will likely find that the IK solver will produce better poses for your character if you intentionally map the skeleton's knees to the ankle Nodes.
- The uppermost joint in the chain should be mapped to the LeftHipNodeId and RightHipNodeId.
- The talus or ankle joint should be mapped to the LeftKneeNodeId and RightKneeNodeId. These joints must be inverted, so that they bend in the proper direction:
HIKInverseJoint(character, HIKLeftKnee, 1); HIKInverseJoint(character, HIKRightKnee, 1);
- The last joint in the chain, which controls the orientation of the sole of the hoof, should be mapped to the LeftFootNodeId and RightFootNodeId.
- The joint immediately before this last joint should be mapped to the LeftAnkleNodeId and RightAnkleNodeId.
- If the skeleton has any other joints that lie between the talus and this second-to-last joint in the chain, they should not be mapped to any Nodes.
This approach to characterization allows more flexibility in the leg:
Other recommendations
To improve the general feel of the poses generated by the IK solver for the hind legs, it is typically best to prevent the hind legs from opening to their full extension during an IK solve. To do this, you can reduce the maximum extension of the leg in the character's HIKPropertySetState to a lower value. A good value for an impala is typically about 160 degrees.
HIKSetPropertyValue(props, HIKLeftLegMaxExtensionAngle, 160.0f); HIKSetPropertyValue(props, HIKRightLegMaxExtensionAngle, 160.0f);
Forelegs
Bone mappings
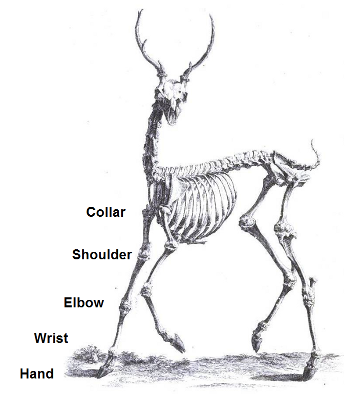
Impala are graceful animals with long and thin front legs. For their forelegs, it is recommended that you characterize the complete joint chain understood by HumanIK:
- LeftCollarNodeId and RightCollarNodeId
- LeftShoulderNodeId and RightShoulderNodeId
- LeftElbowNodeId and RightElbowNodeId: Note that these joints must be inverted, so that they bend in the proper direction:
HIKInverseJoint(character, HIKLeftElbow, 1); HIKInverseJoint(character, HIKRightElbow, 1);
- LeftWristNodeId and RightWristNodeId
- LeftHandNodeId and RightHandNodeId
This characterization will ensure a maximum of flexibility for the forelimbs, especially on the upper parts of the limbs.
 Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. Please see the Autodesk Creative Commons FAQ for more information.
Except where otherwise noted, this work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. Please see the Autodesk Creative Commons FAQ for more information.