La solution IH (indépendante d'historique) ne dépend pas des solutions CI calculées dans les images clés précédentes ; cette solution est donc aussi rapide d'utilisation à l'image 2000 qu'à l'image 20.
Elle utilise un but pour animer une chaîne. Vous animez le but et la solution CI tente de déplacer l'effecteur d'extrémité (le point de pivot de la dernière connexion de la chaîne) à l'emplacement du but. Le but est souvent apparenté à d'autres objets de contrôle tels que des points ou des objets factices ou bien encore des splines ou des structures. Ces objets de contrôle sont à leur tour câblés à des glissières de fenêtre ou de panneau déroulant.
La solution CI a lieu dans un plan appelé plan de la solution. L'angle du plan de la solution dans l'espace univers est défini par un paramètre appelé angle de pivot. Cet angle de pivot peut être animé. Vous pouvez le régler directement ou à l'aide d'un manipulateur.
La solution IH permet la création de chaînes multiples ou se chevauchant. Vous pouvez ainsi créer des buts multiples pour des contrôles supplémentaires. En liant les buts aux points, splines, structures ou objets factices, vous pouvez créer des contrôles simples pour animer des chaînes ou des hiérarchies complexes. Vous pouvez également utiliser des contraintes sur ces buts ou objets de contrôle lors d'une animation.
Application d'une solution IH
Pour appliquer une solution IH à n'importe quelle partie d'une hiérarchie, sélectionnez la structure ou l'objet à partir duquel vous souhaitez commencer la solution. Choisissez ensuite le menu Animation  Solution CI Solution IH. Dans la fenêtre active, déplacez le curseur vers la structure à laquelle vous souhaitez que la chaîne se termine. Lorsque vous cliquez pour sélectionner la structure, le but est dessiné au niveau du point de pivot de cette structure. Si vous souhaitez qu'un but figure à l'extrémité de la structure, affinez-la à l'endroit où sera placé ce but. Une nouvelle structure est ajoutée et vous pouvez alors la sélectionner pour placer le but à son extrémité.
Solution CI Solution IH. Dans la fenêtre active, déplacez le curseur vers la structure à laquelle vous souhaitez que la chaîne se termine. Lorsque vous cliquez pour sélectionner la structure, le but est dessiné au niveau du point de pivot de cette structure. Si vous souhaitez qu'un but figure à l'extrémité de la structure, affinez-la à l'endroit où sera placé ce but. Une nouvelle structure est ajoutée et vous pouvez alors la sélectionner pour placer le but à son extrémité.
Lorsque vous créez des structures, une petite structure " fragmentaire " est automatiquement créée à l'extrémité de la chaîne pour faciliter ce processus.
Définition de chaînes multiples
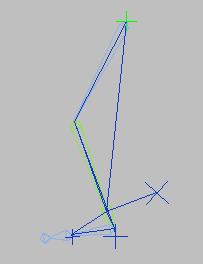
Pour monter le squelette d'une jambe, vous pouvez utiliser trois chaînes pour le membre, comme indiqué ci-dessous :
- La première chaîne est créée de la hanche à la cheville. Cette chaîne contrôle le mouvement général de la jambe, y compris le pliage du genou.
- La deuxième est créée de la cheville à la plante du pied. Cette chaîne contrôle le mouvement vers le haut et vers le bas du talon.
- La dernière est créée de la plante du pied à l'orteil.
Lorsque ces trois chaînes fonctionnent conjointement, elles permettent de maintenir la position du pied dans l'espace. Cela signifie que le pied reste au sol lorsque le corps du personnage se déplace. Les trois chaînes CI de cette configuration hanche-à-orteil placent des buts à des positions clé du pied simulant un comportement naturel du pied. En réalité, l'orteil, la plante du pied et le talon peuvent être plantés au sol ou élevés.
Chaque chaîne dispose d'un but qui contrôle le mouvement sur le talon, la plante du pied et l'orteil. Utilisez les buts CI pour élever le talon, courber l'orteil, déplacer et faire pivoter le pied entier ainsi que pour maintenir la position du pied dans l'espace.
Chevauchement de chaînes
Le système de solution CI permet de créer des chaînes CI se chevauchant dans une hiérarchie unique. Dans le cas d'une jambe, vous pouvez, par exemple, créer une chaîne allant de la hanche à la cheville, une deuxième allant du genou à la plante du pied, puis une dernière allant de la cheville aux orteils. Utilisez des chaînes se chevauchant lorsque vous souhaitez appliquer des buts à des structures séquentielles mais ne voulez pas affiner ces structures.
Les chaînes CI indépendantes d'historique se chevauchant permettent également de maintenir les buts au bas de la hiérarchie fermement en place. Dans le cas d'une jambe, par exemple, la cheville, la plante et l'orteil du pied ne se déplacent pas tant que la partie supérieure de la hiérarchie n'est pas complètement étirée.
Les chaînes se chevauchant maintiennent l'orteil au sol.
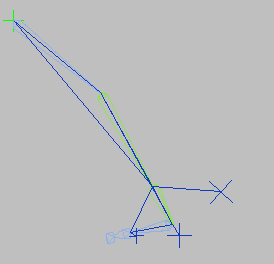
Les chaînes se chevauchant maintiennent l'orteil au sol.
Ne tentez pas d'utiliser des chaînes se chevauchant avec différents types de solutions CI ou vous risqueriez d'obtenir un résultat inattendu.
Création d'objets de contrôle
Afin de créer des objets de contrôle pour animer des buts, créez des objets factices, des points, des splines ou d'autres objets près du but, puis liez ce but à l'objet de contrôle. Dans le cas d'une jambe, par exemple, vous pouvez définir un but à la cheville, à la plante du pied et à l'orteil. Vous créez ensuite 3 splines sous le pied, une pour le talon, une pour la plante et une dernière pour l'orteil. Liez chaque but à chaque spline. Vous pouvez alors utiliser ces splines pour animer les buts. Vous pouvez également lier les splines les unes aux autres, de sorte que la rotation de l'orteil soit contrôlée par le mouvement du talon.
Outre la liaison hiérarchique, vous pouvez désormais utiliser le nouveau système Contrainte conjointement aux solutions CI. Vous pouvez appliquer n'importe quelle contrainte pour créer une relation entre les buts ou les structures et d'autres objets. Vous pouvez contraindre la position du but à un objet factice qui est animé. Vous pouvez également créer trois chaînes de structures ayant la même position et contraindre une chaîne de structures à une autre, puis affecter un poids aux contraintes.
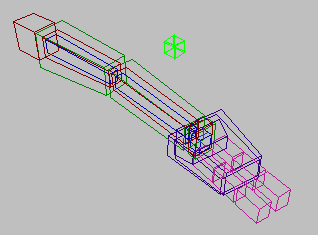
Chaînes de structures contraintes l'une à l'autre.
L'utilisation d'objets de contrôle permet une sélection plus importante dans la fenêtre. Vous pouvez également utiliser les objets de contrôle pour séparer des chaînes ; dans le cas d'un bras humain, par exemple, vous pouvez terminer une chaîne au poignet et en créez une nouvelle pour la main et les doigts. L'objet de contrôle situé au poignet sert de noeud racine pour la chaîne main, mais cette chaîne reste toutefois déconnectée (hiérarchiquement) de la chaîne bras.
Vous pouvez créer des glissières de fenêtre à l'aide de l'assistant de manipulateur, puis utiliser ces dernières pour contrôler les transformations des objets de contrôle. Utilisez les mises en relation des paramètres pour attacher les glissières aux objets de contrôle. Il vous est également possible de créer des attributs personnalisés afin d'ajouter ces glissières aux groupes de fonctions des objets.
Combinaison de cinématique avant et de cinématique inverse
La solution CI indépendante d'historique fournit un outil permettant de combiner CA et CI dans une piste d'animation unique. Un sous-contrôleur CA se trouve sous le contrôleur CI attribué par cette solution.
Lorsque le bouton Activé est activé, les valeurs du sous-contrôleur CA sont conservées mais ignorées. Si tel n'est pas le cas, les valeurs du sous-contrôleur CA sont utilisées. Pour accéder à ce bouton, sélectionnez le but et ouvrez le groupe de fonctions Mouvement, puis désactivez le bouton Activé. Vous pouvez alors effectuer une animation en utilisant les rotations CA des structures ou des objets de hiérarchie.
L'option CI pour pose CA permet d'activer CI au cours d'une manipulation CA. Si le bouton Activé est désactivé et que l'option CI pour pose CA est activée, la sélection et le déplacement du but permettent alors d'utiliser CI pour créer les images clés en cinématique avant. Le déplacement du but permet de positionner le squelette et d'ajouter des clés de rotation à l'ensemble des objets de la chaîne lorsque le bouton Clé auto est activé.
Dans le cas d'une utilisation conjointe de CI et de CA, il est possible de créer une situation dans laquelle le but s'est éloigné de l'extrémité de la chaîne. Utilisez le bouton Accrochage CI/CA pour repositionner le but en le raccrochant à l'extrémité de la chaîne. Si l'option Accrochage auto est activée, l'accrochage se produit automatiquement ; lorsque vous touchez le but, il n'est pas nécessaire d'appuyer sur le bouton Accrochage CI/CA.
Contrôle de la précision CI indépendante d'historique
Lorsque vous effectuez une animation à l'aide de solutions IH, si vous trouvez que l'animation des membres n'est pas fluide, essayez de doubler le nombre d'itérations dans la zone Solutions du panneau déroulant Propriétés solution IH. Vous pouvez également tenter de réduire la valeur Seuils afin de lisser l'animation.