HI (非履歴従属) IK ソルバはタイムラインで前にあるキーフレームで計算された IK ソルバに依存しません。このため、フレーム 2000 で使用する速度はフレーム 20 で使用する速度と同じです。
HI ソルバはチェーンのアニメートにゴールを使用します。ゴールをアニメートすると IK ソルバはエンド エフェクタ(チェーンの最後の関節の基点)を移動してゴールの位置に合わせようとします。多くの場合、ゴールはポイントやダミー、スプラインやボーンのような他のコントロール オブジェクトの親で、このようなコントロール オブジェクトは次々とビューポートやロールアウト スライダにワイヤリングされていきます。
IK ソリューションは平面で発生し、「ソルバ平面」と呼ばれます。ワールド空間のソルバ平面アングルはターン角度と呼ばれるパラメータで制御します。ターン角度はアニメート可能です。直接調整したり、マニピュレータで調整することもできます。
HI ソルバを使うと、複数チェーンや重複チェーンを作成することができます。これにより、追加したコントロールに複数のゴールを作成できます。ゴールをポイント、スプライン、ボーン、ダミーにリンクすると、単純なコントロールを作成して複雑なチェーンや階層をアニメートすることができます。また、このようなゴールやコントロール オブジェクトで別のアニメーション ツールとしてコンストレイントを使うこともできます。
HI ソルバを適用
階層のいずれかの部分に HI ソルバを適用するには、ソルバを開始するボーンやオブジェクトを選択します。次に、[アニメーション](Animation)メニュー  [IK ソルバ](IK Solvers) [HI ソルバ](HI Solver)を選択します。アクティブなビューポートで、チェーンを終了させるボーンにカーソルを移動します。ボーンをクリックして選択すると、そのボーンを基点にしてゴールが描画されます。ゴールをそのボーンよりも先に置きたい場合は、ゴールを設定するボーンをリファインします。外部ボーンが追加され、そのボーンを選択すると終端にゴールが配置されます。
[IK ソルバ](IK Solvers) [HI ソルバ](HI Solver)を選択します。アクティブなビューポートで、チェーンを終了させるボーンにカーソルを移動します。ボーンをクリックして選択すると、そのボーンを基点にしてゴールが描画されます。ゴールをそのボーンよりも先に置きたい場合は、ゴールを設定するボーンをリファインします。外部ボーンが追加され、そのボーンを選択すると終端にゴールが配置されます。
ボーンを作成すると、チェーンの終端に小さな「継ぎ目」ボーンが自動的に作成されます。
複数チェーンの設定
脚のスケルトンを用意すると、片方の脚で次のような 3 つのチェーンが使用できます。
- 最初のチェーンは、尻から足首にかけて作成されます。このチェーンは膝を曲げることを含めた脚の動き全体を制御します。
- 2 番目のチェーンは、足首から指の付け根にかけて作成されます。このチェーンはかかとを上下させる動きを制御します。
- 3 番目のチェーンは、足の指の付け根からつま先にかけて作成されます。
この 3 つのチェーンが同時に動くと、スペースでの足の位置を固定します。つまりキャラクタの体が移動しても足を地面に着けたままにすることができます。尻からつま先までのこのような 3 つの IK チェーンはすべて足のキー位置をゴールとしており、これによって足の自然な動きを再現します。現実世界では、つま先、足の指の付け根、かかとは地面についているか地面から離れているかのどちらかです。
それぞれのチェーンにはかかと、足の指の付け根、つま先を動かすゴールがあります。IK ゴールを使って、かかとを上げたり、つま先を曲げたり、足全体を動かして回転させたり、スペースでの足の位置を維持することができます。
チェーンの重複
IK ソルバ システムを使うと、単一階層で IK チェーンを重複させて作成することができます。たとえば脚の場合、尻から足首につながるチェーンを作り、次に膝から脚の指、最後に足首からつま先へのチェーンを作ることができます。連続するボーンにゴールを適用してもボーンをリファインしたくない場合は重複チェーンを使用します。
この他にも重複 HI IK チェーンの利用法としては、その場に固定する階層の底辺にゴールを置く場合です。脚の例でいうと、足首、指の付け根、つま先は上部階層が最大限に引き伸ばされるまでは動くことがありません。
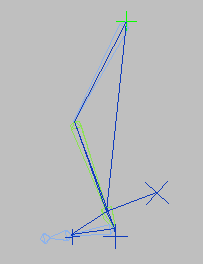
重複チェーンを使い、つま先立ちをさせています。
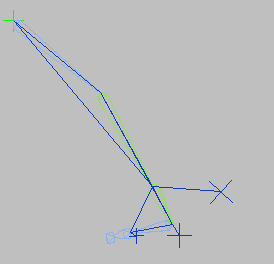
重複チェーンを使い、つま先立ちをさせています。
異なる IK ソルバのチェーンを重複させないようにしてください。予期しない結果を招く場合があります。
コントロール オブジェクトの作成
コントロール オブジェクトを作成してゴールをアニメートするには、ダミー、ポイント、スプライン、その他のオブジェクトをゴールの近くに作成し、ゴールとコントロール オブジェクトをリンクさせます。人間の脚では、ゴールは足首、指の付け根、つま先にある場合が多いでしょう。そこで足の下に 3 つのスプラインを作成します。かかと、指の付け根、つま先のスプラインです。それぞれのゴールとスプラインをリンクさせると、スプラインを使ってゴールをアニメートできます。スプラインを一緒にリンクさせ、足首の回転をかかとの動きで制御することもできます。
階層リンクの他にも、新しいコンストレイント システムを IK ソルバと関連させて使うこともできます。任意のコンストレイントを適用してゴールやボーンと他のオブジェクトとの関係を作ることができます。ゴールの位置を、移動するダミーで制限することもできます。または、同じ場所にボーン チェーンを 3 つ作成し、各ボーン チェーンが隣のボーン チェーンをコンストレイントするようにしてから各コンストレイントの重み付けを設定することもできます。
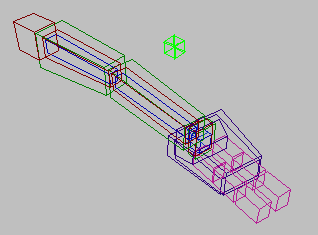
相互制限されているボーン チェーン
コントロール オブジェクトを使用すると、ビューポートで大きなものを選択できます。コントロール オブジェクトを使ってチェーンを分離することもできます。たとえば、人間の腕で 1 つのチェーンを手首で終了させ、手と指には別のチェーンを作成することもできます。手首のコントロール オブジェクトは手のチェーンのルート ノードになりますが、腕のチェーンから切断されています(階層として切断されているという意味です)。
マニピュレータ ヘルパーを使ってビューポート スライダーを作成し、コントロール オブジェクトの変換を制御することができます。ワイヤ パラメータを使って、コントロール オブジェクトとスライダをつなぎます。カスタム アトリビュートを作成してオブジェクト ロールアウトにスライダを追加することもできます。
フォワード キネマティックとインバース キネマティックをミックスする
HI IK ソルバは、単一のアニメーション トラックで FK と IK をミックスするツールを提供します。このソルバによって割り当てられた IK コントローラの下に FK サブコントローラがあります。
[有効](Enabled)ボタンがオンの場合、FK サブコントローラの値は保存されていますが無視されます。[有効](Enabled)ボタンがオフの場合、FK サブコントローラの値が表示されます。[有効](Enabled)ボタンにアクセスするには、ゴールを選択して[モーション](Motion)パネルに移動し、[有効](Enabled)ボタンをオフにします。これにより、ボーンの FK 回転や階層オブジェクトを使用してアニメートすることができます。
FK ポーズ用 IK を使うと、FK マニピュレーションの途中で IK をオンにすることができます。[有効](Enabled)ボタンをオフにすると、FK ポーズの IK がオンになるので、ゴールを選択して移動し、IK を使ってフォワード キネマティック キーフレームを作成できます。ゴールを移動すると、スケルトンにポーズが付き、[オート キー](Auto Key)ボタンがオンの場合はチェーン内のすべてのオブジェクトに回転キーが追加されます。
IK と FK を同時に使うと、ゴールがチェーンの終端から移動されたという状況を作り出すことができます。[IK/FK]スナップ ボタンを使ってゴールを再設定し、チェーンの終点に再スナップさせます。[自動スナップ](AutoSnap)がオンであれば、自動的にスナップされ、ゴールに触れても[IK/FK]スナップ ボタンをクリックする必要がありません。
HI IK 精度をコントロール
HI ソルバをアニメートさせているときに手足のアニメーションがスムーズでなかったら、[HI ソルバのプロパティ](HI Solver Properties)ロールアウトの[ソリューション](Solutions)領域にある[反復](Iterations)を 2 倍にしてみます。また、[しきい値](Thresholds)の値を減らしてアニメーションをスムーズにしてみます。