定義(Definition)タブを使用してキャラクタのスケルトンのボーンを HumanIK ソルバが認識できるノードにマップするには、キャラクタを基本の T スタンスにセットアップして、キャラクタのスケルトンのプロポーションとジョイントのトランスフォームに関する重要な情報を HumanIK に提供する必要があります。
IK ソルバとリターゲット ソルバがキャラクタに対して正確な結果を生成するようにするには、キャラクタの T スタンスを、次の説明や例に可能なかぎり近い状態にする必要があります。T スタンスが適切に構成されていないと、ソルバの操作はすべて欠陥データに基づくものになり、ポーズが歪む、不自然になる、予期せぬポーズになるといった結果につながります。
T スタンスには次の要件があります。
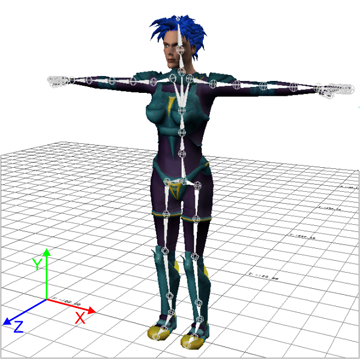
- キャラクタは Z 軸の正の方向を向いている必要があります。
- 腕は X 軸に沿って広がっている必要があります。したがって、左腕は X 軸の正の方向を指している必要があります。
- キャラクタの頭頂部は上方向、つまり Y 軸の正の方向を向いている必要があります。
- 手のひらが地面に向き、親指が X 軸と平行になった状態でキャラクタの手は水平になります。
- キャラクタの足は(図のようにつま先が Z 軸に沿うような向きで)脚と垂直になっている必要があります。脚を Y 軸のまわりで回転させないようにします(左足指が内側、つまり右脚方向に向いたり、外側、つまり右脚から遠ざかったりしないようにする)。
典型的な T スタンスを次の図に示します。
注: HumanIK に必須のボーン構造の詳細については、HumanIK キャラクタの構造を参照してください。
四足歩行
HumanIK を使用すると、二足歩行だけでなく四足歩行も制御できます。四足歩行のキャラクタをキャラクタ化する場合、キャラクタのスケルトンを、上記と同じ T スタンスにセットアップする必要があります。この二足歩行用 T スタンスは四足歩行には不自然でそのまま利用することはできませんが、HumanIK がキャラクタのスケルトンのプロポーションで適切にセットアップされるようにするには、キャラクタを二足歩行用のスタンスにセットアップする必要があります。