
-
Sélectionnez un ou plusieurs corps rigides MassFX. > Boîte de dialogue Outils MassFX > (Editeur multi-objet)
Lorsque vous utilisez le groupe de fonctions Modifier avec une sélection de corps rigides, procédez comme suit :
- Vous pouvez créer de nouvelles valeurs prédéfinies de matériau physique uniquement dans le groupe de fonctions Editeur multi-objet et non dans l'interface du modificateur.
- La modification de la propriété Maillage Physique avec le groupe de fonctions Editeur multi-objet est limitée à chaque corps rigide doté d'une forme physique unique. Pour modifier ou créer des objets avec plusieurs maillages, utilisez le modificateur Panneau déroulant Formes physiques.
Interface
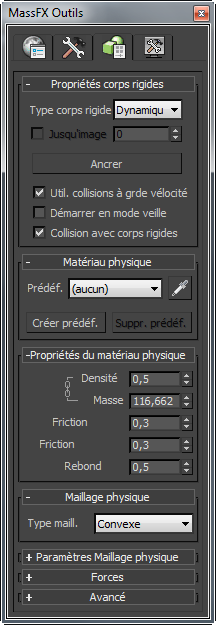
Panneau déroulant Propriétés corps rigide
A une exception près, ces commandes ne sont disponibles que lorsque tous les objets sélectionnés sont des corps rigides non ancrés. La seule exception est la suivante : lorsque la sélection est composée uniquement de corps rigides ancrés, le bouton Désancrer est disponible pour restaurer les objets à leur état non ancré.
- Type de corps rigides
- Type de simulation pour tous les corps rigides sélectionnés. Les choix disponibles sont les suivants : Dynamique, Cinématique et Statique. Pour plus de détails, reportez-vous à la rubrique Types de corps rigides : Dynamique, Statique et Cinématique.
- Jusqu'image
- Lorsque cette option est activée, MassFX convertit les corps cinématiques sélectionnés en corps dynamiques au niveau de l'image spécifiée. Cette option est disponible uniquement lorsque le type de corps rigide est défini sur Cinématique.
Cela signifie que vous pouvez animer un objet à l'aide de méthodes standard et définir le type de corps rigide sur Cinématique, de sorte qu'il se comporte comme un objet animé jusqu'à l'image voulue. Le corps rigide devient à ce moment un objet dynamique et il est par conséquent soumis aux forces de la simulation MassFX dans leur ensemble.
Par exemple, pour recréer un match de baseball, vous pouvez animer la balle de telle façon qu'elle quitte la main du lanceur et s'élève en direction de la batte. Ensuite, à l'aide de l'option Jusqu'image, MassFX prend la relève lorsque la batte frappe la balle et simule de façon précise l'action du batteur démarrant un tour de terrain (ou commettant une faute).
Conseil : Un corps rigide n'a pas besoin d'être animé pour tirer parti de cette fonction. Vous pouvez par exemple suspendre plusieurs corps fixes et les placer à différents moments. Pour effectuer cela, il suffit de tous les définir en tant que corps cinématiques et d'activer l'option Jusqu'image, puis de les sélectionner à tour de rôle et de spécifier l'image à laquelle ils doivent commencer à être soumis à la gravité. - Ancrer / Désancrer
- Convertit les mouvements des corps rigides désancrés sélectionnés à l'animation standard des images clés. Cela s'applique uniquement aux corps rigides dynamiques et n'est disponible que lorsque tous les corps rigides sélectionnés sont ancrés ou non ancrés (pas une combinaison).
Si tous les corps rigides sélectionnés sont ancrés, l'étiquette du bouton indique "Désancrer". Si vous cliquez sur ce bouton, vous supprimez les images clés et restaurez l'état Dynamique des corps.
- Utiliser les collisions à grande vélocité
- Lorsque cette option et l'interrupteur du groupe de fonctions universel
 Utiliser les collisions à grande vélocité sont activés, les paramètres de collisions à grande vélocité s'appliquent aux corps rigides sélectionnés.
Utiliser les collisions à grande vélocité sont activés, les paramètres de collisions à grande vélocité s'appliquent aux corps rigides sélectionnés. - Démarrer en mode veille
- Lorsque cette option est activée, les corps rigides démarrent la simulation en mode veille à l'aide des paramètres globaux de veille. Cela signifie qu'ils restent immobiles jusqu'à ce qu'un autre corps rigide actif ne les touche. Par exemple, pour simuler un rallye de dominos, démarrez tous les dominos en mode veille à l'exception du premier.
- Collision avec corps rigides
- Lorsque cette option est activée (par défaut), les corps rigides sélectionnés entrent en collision avec d'autres corps rigides de la scène.
Panneau déroulant Matériau physique
Ce panneau déroulant fournit des outils de base pour l'utilisation de matériaux physiques qui déterminent la manière dont les corps rigides interagissent avec d'autres éléments de la simulation. Pour définir des valeurs spécifiques, utilisez le panneau déroulant Propriétés du matériau physique (voir ci-dessous).
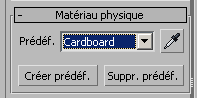
- Prédéfini
- Sélectionnez un matériau prédéfini dans la liste déroulante pour modifier toutes les valeurs indiquées sur le panneau déroulant Propriétés du matériau physique, afin que ces dernières correspondent aux valeurs prédéfinies et qu'elles soient appliquées à la sélection.
Pour utiliser les paramètres d'un autre corps rigide dans la scène, cliquez sur
 puis sélectionnez un corps rigide dans la scène.
puis sélectionnez un corps rigide dans la scène. Lorsque vous affectez le modificateur Corps rigide MassFX à un objet pour la première fois, MassFX attribue un jeu de propriétés de matériau physique par défaut, comprenant une densité = 0,5 et ainsi de suite, mais n'attribue pas de matériau physique. Ainsi, la valeur prédéfinie active correspond à (Aucun), ce qui vous permet de modifier immédiatement les propriétés du matériau. Si vous affectez une valeur prédéfinie à partir de la liste, ses paramètres s'affichent dans le panneau déroulant Propriétés du matériau physique, mais sont verrouillés et ne sont pas disponibles. Pour modifier les paramètres, cliquez sur le bouton Verrouiller pour les déverrouiller.
- Création de valeurs prédéfinies
- Crée une nouvelle valeur prédéfinie de matériau physique à partir des valeurs actives. Ouvre la boîte de dialogue Nom de matériau physique, dans laquelle vous pouvez saisir un nom pour la nouvelle valeur prédéfinie. Lorsque vous cliquez sur OK, le nouveau matériau devient actif, puis il est ajouté à la liste des valeurs prédéfinies.
- Supprimer la valeur prédéfinie
- Supprime la valeur prédéfinie active de la liste et définit la liste sur (Aucun). Les valeurs actives sont conservées.
Panneau déroulant Propriétés du matériau physique
Les propriétés du matériau physique contrôlent la façon dont les corps rigides interagissent avec d'autres éléments de la simulation : leur masse, leur friction, leur rebond, etc. Une fois ces propriétés définies, vous pouvez les enregistrer en tant que valeurs prédéfinies à l'aide des commandes du panneau déroulant Matériau physique (voir ci-dessus).
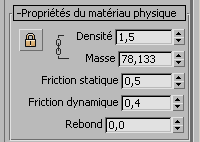
 Verrouiller/Déverrouiller
Verrouiller/Déverrouiller- Lorsque cette option est activée, comme l'indique l'arrière-plan coloré, les paramètres des propriétés de la valeur prédéfinie active ne sont pas disponibles pour modification. Pour modifier les valeurs, cliquez sur ce bouton afin de déverrouiller les paramètres.
Lorsqu'une valeur prédéfinie est affectée, les paramètres sont verrouillés par défaut. Si aucune valeur prédéfinie n'est affectée, comme l'indique l'étiquette (Aucune), le bouton Verrouiller n'est pas disponible et les paramètres sont toujours modifiables.
Après avoir modifié les valeurs des propriétés, utilisez Créer prédéf. (voir ci-dessus) pour les enregistrer en tant que nouvelles valeurs prédéfinies. Si vous n'effectuez pas cette opération, les valeurs modifiées seront perdues lorsque vous sélectionnerez une autre valeur prédéfinie.
- Densité
- La densité du corps rigide est exprimée en g/cm3 (grammes par centimètre cube). Ceci représente un millième de la mesure équivalente exprimée en unités internationales SI : kg/m3. La modification de cette valeur calcule automatiquement la masse correcte de l'objet en fonction de son volume.
- Masse
- Poids du corps rigide, exprimé en kg (kilogrammes). La modification de cette valeur met automatiquement à jour la densité de l'objet en fonction de son volume.
- Friction statique
- Degré de difficulté de deux corps rigides à amorcer un glissement l'un par rapport à l'autre. Une valeur de 0,0 indique une absence de friction (valeur plus glissante que celle du téflon); une valeur de 1,0 indique une friction totale (colle caoutchouc sur papier de verre).
La friction statique effective entre deux corps rigides est le produit de leurs valeurs de friction statique. Si un corps rigide possède une valeur de friction statique de 0,0, le type de valeur de l'autre corps rigide n'a pas d'importance. (Tout glisse sur de la glace mouillée, même le papier de verre). Lorsque les deux objets commencent à glisser l'un contre l'autre, la friction dynamique (voir ci-dessous) s'applique à la place.
- Friction dynamique
- Degré de difficulté de deux corps rigides à assurer la continuité d'un glissement l'un par rapport à l'autre. Techniquement, ce paramètre est appelé "coefficient de friction cinématique". Une valeur de 0,0 indique une absence de friction (valeur plus glissante que celle du téflon); une valeur de 1,0 indique une friction totale (caoutchouc, ciment ou papier de verre).
Dans le monde réel, cette valeur doit être inférieure au coefficient de friction statique. (il est plus difficile de commencer à pousser un canapé sur le sol que d'assurer la continuité de son déplacement.) Comme pour la friction statique, la valeur effective entre deux corps rigides est le produit de leurs valeurs respectives.
- Rebond
- Comment faire rebondir un objet facilement lorsqu'il rencontre un autre corps rigide et augmenter la hauteur de ce rebond. Techniquement, ce paramètre est appelé "coefficient de restitution". Une valeur de 0,0 indique l'absence de rebond (comme du beurre de cacahuète tombant sur un tapis); une valeur de 1,0 indique que l'intensité du rebond de l'objet est approximativement égale à la force avec laquelle l'objet a été frappé.
Le rebond effectif entre deux corps rigides est la moyenne arithmétique de leurs valeurs de rebond : ajoutez leurs valeurs de rebond et divisez par deux. Par conséquent, le rebond de deux corps avec des valeurs de rebond de 0.5 chacune a le même effet que de faire rebondir un corps avec une valeur de rebond de 1.0 sur un corps avec une valeur de rebond de 0.0.
Conseil : Si des rebonds répétés s'arrêtent de manière inattendue ou s'étendent sur une plage trop longue, définissez le champ Paramètres de rebond sur Manuel et ajustez la valeur Vitesse Min. Pour prolonger le rebond, diminuez la valeur Vitesse Min ; pour l'arrêter plus tôt, augmentez cette valeur.
Panneau déroulant Maillages physiques
Un maillage physique de corps rigide (également connu en tant que forme physique) désigne la représentation de ce dernier dans la simulation. Pour plus de détails, reportez-vous à la rubrique Présentation Corps rigides.
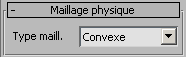
- Type de maillage
-
Type de forme physique pour les corps rigides sélectionnés. Les types disponibles sont Sphère, Boîte, Capsule, Convexe, Concave, Original et Personnalisé. Les types Sphère, Boîte et Personnalisé sont des primitives MassFX et effectuent des simulations plus rapidement que les autres. Pour de meilleures performances, utilisez le type qui vous paraît le plus simple.
En général, la modification du type de forme génère une nouvelle forme correspondant au type choisi et redimensionné pour s'adapter aux pourtours du maillage graphique. La seule exception est le type Concave, qui doit être créé manuellement. Les options disponibles dépendent du type de forme actif et sont disponibles dans le panneau déroulant Paramètres de maillage physique (voir ci-dessous).
Remarque : Ce paramètre n'est pas disponible si un objet sélectionné utilise plusieurs formes physiques. Par ailleurs, le panneau déroulant ne peut pas être utilisé pour la création de formes physiques multiples destinées à un corps rigide. Dans ces cas-là, utilisez le modificateur Panneau déroulant Formes physiques pour un seul objet sélectionné.
Panneau déroulant Paramètres de maillage physique
Le contenu de ce panneau déroulant peut varier en fonction du type de maillage défini (voir ci-dessus). Pour obtenir une description des paramètres de chaque type, reportez-vous à la rubrique Types de formes physiques MassFX.
Panneau déroulant Forces
Utilisez le panneau déroulant Forces pour définir la gravité et appliquer des déformations spatiales de force au corps rigide.
- Utiliser la gravité de l'univers
- Lorsque cette option est désactivée, les corps rigides sélectionnés utilisent uniquement les forces appliquées et ne tiennent pas compte de la configuration de la gravité de l'univers. Lorsque cette option est activée, les corps rigides utilisent la configuration Gravité globale.
- Forces de scène appliquées
- Dresse la liste des déformations spatiales de force dans la scène qui affectent les corps rigides dans la simulation. Utilisez Ajouter (voir ci-après) pour appliquer une déformation spatiale à la sélection. Pour éviter qu'une déformation spatiale affecte la sélection, mettez-la en surbrillance dans la liste et cliquez sur Supprimer.
- Ajouter
- Applique une déformation spatiale de force dans la scène pour les corps rigides dans la simulation. Après l'ajout d'une déformation spatiale à la scène, cliquez sur Ajouter et sélectionnez la déformation spatiale dans la fenêtre.
- Supprimer
- Empêche que la déformation spatiale appliquée n'affecte la sélection. Commencez par la mettre en surbrillance dans la liste, puis cliquez sur Supprimer.
Panneau déroulant Paramètres avancés
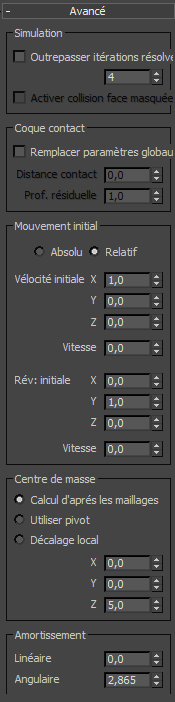
Zone Simulation
- Outrepasser les itérations du résolveur
- Lorsque cette option est activée, utilisez le paramètre des itérations du résolveur spécifié ici pour les corps rigides sélectionnés, à la place du paramètre global .
Définissez la valeur numérique sur le nombre de fois où le résolveur applique les collisions et les contraintes. Des valeurs plus élevées peuvent être nécessaires lorsque la simulation utilise de nombreuses contraintes, ou lorsque la tolérance pour les erreurs de connexion est très faible. Les valeurs supérieures à 30 sont généralement inutiles.
- Activer collision face masquée
- Cette option n'est disponible que pour les corps rigides statiques. Lorsque vous spécifiez le type de forme originale d'un corps rigide concave statique, activez cette option pour que les objets dynamiques dans la simulation entrent en collision avec les faces masquées.
Par exemple, prenez une boîte primitive, Convertissez-la en format poly éditable, supprimez un côté, puis transformez-la en un corps rigide statique au type de forme d'origine. Si vous placez un objet dynamique dans la boîte de dialogue, activez l'option Activer la collision de la face masquée de la boîte pour empêcher l'objet de tomber par les côtés.
Groupe Coque contact
Utilisez ces paramètres pour déterminer le volume environnant dans lequel MassFX détecte des collisions entre les corps dans la simulation.
- Remplacer paramètres globaux
- Lorsque ces options sont activées, utilisez le paramètre de chevauchement de collisions spécifié ici pour les corps rigides sélectionnés, à la place du paramètre global.
- Distance contact
- Distance sur laquelle le chevauchement des corps rigides est autorisé.
Une valeur trop élevée peut provoquer une interpénétration visible des objets. Une valeur définie trop faible peut entraîner la présence de bruit, car les objets interpénètrent une image tout en étant alternativement forcés sur une séparation.
Le meilleur choix de valeur dépend de plusieurs facteurs, comme par exemple la taille des objets dans la scène, la proximité de la caméra pour de possibles interpénétrations, les paramètres d'accélération de la gravité, les itérations du résolveur, la quantité d'inflation des formes physiques et la fréquence d'images de la simulation.
- Profondeur résiduelle
- Distance sur laquelle le chevauchement des corps au repos est autorisé. Ce paramètre peut entrer en ligne de compte lorsque vous utilisez la capture des transformations pour définir des corps à leur position initiale dans la simulation. Remarque : Lorsque vous modifiez la valeur Distance contact, la valeur Profondeur résiduelle prend automatiquement la même valeur, à laquelle est ajoutée la différence entre les deux. Par exemple, supposons que la valeur Distance contact est définie sur 10.0 et que Profondeur résiduelle est égale à 8.0 (différence =-2.0). Si vous définissez ensuite Distance contact sur 6.5, la valeur Profondeur résiduelle devient automatiquement 4.5 (6.5 + (-2.0)). Cependant, la modification de la valeur Profondeur résiduelle n'a pas d'incidence sur le paramètre Distance contact.
Zone de mouvement initial
- Absolu/Relatif
- Ce paramètre s'applique uniquement aux corps rigides démarrant en tant que corps rigides cinématiques (généralement, ils sont déjà animés) puis devenant dynamiques au niveau de l'image spécifiée (à l'aide de l'option Jusqu'à image du panneau déroulant Propriétés corps rigides). Normalement, la vélocité et la rotation initiales de ce type de corps sont calculées en fonction de l'animation de la dernière image qui précède leur transformation en corps dynamiques. Lorsque cette option est définie sur Absolue, les valeurs de la vitesse et de la rotation initiale (voir ci-dessous) sont substituées par les valeurs basées sur l'animation. Lorsque cette option est définie sur Relatif, les valeurs spécifiées sont ajoutées aux valeurs calculées à partir de l'animation.
- Vélocité initiale
- Direction et vitesse de départ (en unités par seconde) du corps rigide lorsque celui-ci devient dynamique. Les paramètres XYZ sont conservés en tant que vecteurs normalisés, qui peuvent être difficiles à modifier ou à représenter. Pour visualiser la direction de la vélocité initiale et éventuellement la modifier à l'aide de l'outil Rotation, utilisez le niveau de sous-objet Vélocité initiale.
- Révolution initiale
- Axe et vitesse de départ (en degrés par seconde) de la rotation du corps rigide lorsque celui-ci devient dynamique. Les paramètres XYZ sont conservés en tant que vecteurs normalisés, qui peuvent être difficiles à modifier ou à représenter. Pour visualiser l'axe de révolution initiale et éventuellement le modifier à l'aide de l'outil Rotation, utilisez le niveau de sous-objet Révolution initiale.
Zone Centre de gravité
Choisissez l'une des opérations suivantes :
- Calcul d'après les maillagesDétermine automatiquement un centre de masse approprié pour le corps rigide sur la base de sa géométrie.
- Utiliser pivotUtilise le Pivot de l'objet à son centre de gravité.
- Décalage localPermet de définir la distance entre le pivot de l'objet sur les axes X, Y et Z à utiliser pour le centre de gravité.
Zone d'amortissement
L'amortissement ralentit les corps rigides. Son utilisation courante permet par exemple de réduire les oscillations dans une simulation ou de créer l'impression qu'un objet se déplace dans un milieu dense.
- Linéaire
- Quantité de force appliquée pour réduire la vélocité de déplacement des objets.
- Angulaire
- Quantité de force appliquée pour réduire la vitesse de rotation des objets.